User Guide
- インターフェイス概要
- 02. はじめに - はじめに
- 03. はじめに - CNC ワークフロー
- 04. はじめに - ワンタイムセットアップ
- はじめに - サンプルプロジェクト
- 2Dデザインと管理
- 07. 中級 - 3Dデザインと管理
- ロータリージョブの作成
- 2D ツールパスを使用したシンプルなロータリー モデリング
- ロータリー加工とラッピング
- Rotary プロジェクトへの外部モデルのインポート
- 高度 - インポートされた 3D ツールパス ファイル
- ポストプロセッサ編集
インターフェイス概要
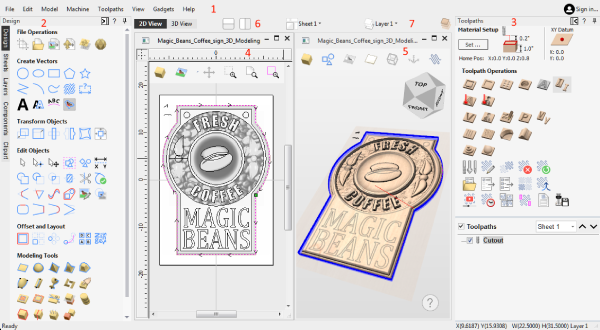
- メインメニューバー(ドロップダウンメニュー):画面上部にあるこのバーには、ファイル、編集、モデル、工具経路、表示、ヘルプの各メニューが表示されます。ここから、機能別に分類されたソフトウェアのコマンドにアクセスすることができます。いずれかのメニューをクリックすると、利用可能なコマンドが記載されたドロップダウンリストが表示されます。
- デザインパネル:画面の左側に表示されます。デザインタブとタブ内のデザインを作成するためのアイコンへのアクセスが可能です。
- 工具経路タブ:画面の右側に表示されます。工具経路タブの上部には、工具経路の作成、編集、プレビューを行うための全アイコンが表示されます。タブの下部には作成済みの工具経路が表示されます。
- 2Dデザインウィンドウ:加工用デザインの表示、編集、選択を行うためのウィンドウです。デザインはインポートまたはソフトウェアで直接作成することができます。これは3Dビューでも同様で、F2キーとF3キーの使用、またはウィンドウ上部のタブをクリックして切り替えることができます。
- 3Dビュー:合成モデル、工具経路、工具経路プレビューが表示されます。
- インターフェイスレイアウトボタン(作図タブの2Dビューコントロールセクション):2Dビューと3Dビューを同時表示、またはデザインの後期工程で工具経路タブへフォーカスを切り替える場合に使用し、異なる既定のインターフェイスレイアウト間を切り替えます。
- ここからクイック ドロップダウン メニューにアクセスして、作業中の現在のレイヤー、シート、またはコンポーネント レベルを変更できます。
 インターフェイスの管理
インターフェイスの管理
ツール ページには自動非表示/表示動作があり、使用されていないときに自動的に閉じることができるため、作業画面領域を最大化できます。
ソフトウェアには、設計用と加工用の 2 つのデフォルト レイアウトが含まれており、各ツール ページに適切な自動非表示動作を自動的かつ便利に設定できます。各ツール ページのレイアウト切り替えボタンを使用すると、プロジェクトの設計段階からツールパス段階に焦点が自然に移るときに、インターフェイスを切り替えることができます。
自動非表示タブへのアクセス
ツールページが自動非表示(ピン付けされていない)の場合、画面のサイドにタブのみとして表示されます。詳細は、ツールページのピン付け/ピンを外すを参照してください。当該タブにマウスオーバーすると、一時的にページが表示されます。ページからツールを選択すると、再度自動的に非表示になります。
ツールページのピン付け/ピンを外す
各ツールページの自動非表示動作は、各ページのタイトル領域の右上にある画びょうアイコンを使用して制御可能です。


デザイン/工具経路のデフォルトレイアウト
VCarve Proには、通常のデザインワークフローと工具経路作成を補助するための2つのツールレイアウトページがあります。
すべてのタブに[レイアウト切り替え]ボタンがあります。作図とモデリングタブで当該ボタンを使用すると、工具経路タブをピン付けして作図とモデリングツールタブのピンを外し、工具経路タスクにインターフェイスのフォーカスが移動されます。工具作成タブでは、当該ボタンによってレイアウトが元に戻されます。つまり、工具経路ページのピンを外して作図とモデリングタブのピン付けを行います。これらの2つのタブは、F11キーとF12キーを使用して切り替え可能です。
ヘルプ ?
すべての形式に ? があります。アイコンをクリックすると、使用しているツール フォームの詳細を説明する適切なヘルプ コンテンツ ページに移動します。

3D ビューのヘルプ プロンプト
ヘルプ プロンプトは、現在のツールまたは操作を追跡し、関連するヘルプ ドキュメントや現在のツールのヒントに簡単にアクセスできるようにします。
02. はじめに - はじめに
はじめに
活気あふれる Vectric コミュニティへようこそ! Vectric ソフトウェアを使用することで、CNC マシンを最大限に活用する素晴らしい選択ができました。この短いガイドは、1 時間もかからずに CNC マシンの切断を正しく行うのに役立ちます。その過程で、完全なリファレンス マニュアルで重要な概念とツールを取り上げます。これらのリンクは、各ステップをより詳細に確認し、スキルの開発を始めるのに役立ちます。
概要
このガイドの最初のセクションでは、Vectric ソフトウェアを使用した CNC ツールパス作成の主な原則について説明します。すべての CNC プロジェクトは同様のワークフローに従い、当社のソフトウェアはこれらの手順を自然かつ直感的に反映するように設計されています。
次に、製品のライセンスを付与し、Vectric のオンライン ポータルである V&Co へのアクセスを提供するための 1 回限りのセットアップを完了します。このポータルを使用して、特定の CNC マシンのソフトウェアを自動的に構成します。
最後のセクションでは、シンプルですが完全な CNC プロジェクトを最初から最後までステップごとに実行します。プロジェクトの最後には、CNC マシンが正しく構成され、シンプルなプロファイル ツールパス戦略を使用してベクター図面をカットできることが保証されるはずです。
03. はじめに - CNC ワークフロー
Vectricワークフロー
サンプル プロジェクトでは、簡単な線画の作成、ツールパス、切り取りのすべての段階を順を追って説明します。ほとんどの CNC プロジェクトには共通の概念と手順が多数あるため、実際のプロジェクトを完了する前に、それらを一通り確認してみましょう。
Vectricジョブの構造
単一の CNC プロジェクトを記述するために必要なすべての情報は、Vectric Job ドキュメントに含まれています (保存すると、ファイル サフィックスは *.crv または *.crv3d になります)。新しいジョブは常に、CNC マシンで切断する予定の物理材料のシートの領域を定義することから始まります。
ほとんどのジョブでは通常 1 枚の材料シートのみが使用されますが、より複雑なプロジェクトでは複数の材料が使用される場合があります。心配しないでください。デザインが進むにつれて、ジョブの主な材料シートを更新したり、新しい材料シートをジョブに追加したりできます。
マテリアル シートでの作業に使用する図面と画像は、より複雑なデザインを管理するためにレイヤー上に作成できます。同様に、3D モデル コンポーネントもレベル上に整理できます。デフォルトでは、新しいジョブの各シートに少なくとも 1 つのレイヤーと 1 つのレベルが常に存在します。レイヤーとレベルをさらに追加して、より複雑なプロジェクトを整理できます。
ジョブ設定フォームでマテリアル シートが作成されると、ソフトウェアは設計スペースの 2D ビューと 3D ビュー (現在のマテリアル シートの寸法に一致) をそれぞれ独自のウィンドウに表示します。
ビュー ウィンドウの上にはメイン ツールバーがあり、これを使用して CNC ジョブの構造をナビゲートし、下のビュー ウィンドウに現在表示されている内容を確認できます。現在作業中の材料シート、設計レイヤー、3D モデル レベル (「アクティブ」と呼ばれます) が表示されます。
以下の 2D および 3D 設計ビューに表示される内容は、現在の設定を反映したもので、新しいシェイプ、コンポーネント、またはツールパスは、示されているアクティブな場所に作成されます。また、これらのコントロールからいつでも、アクティブなシート、アクティブなレイヤー、またはアクティブなレベルを直接変更することもできます。
より高度なプロジェクトでは、材料シートの両面を表示することもできます。両面プロジェクトの場合、ビューの上にある追加のコントロールに、現在アクティブなシートの面が表示されます。各材料シートの上面と下面に関連付けられた図面、モデル、およびツールパスを表示し、他のコントロールと一貫した方法でシートのアクティブな面を入れ替えることができます。
最初はジョブが空なのでビューも空白になりますが、時間が経つにつれて、Vectric のビュー ウィンドウに、現在アクティブなマテリアル シートのすべてのレイヤー化された図面と画像、3D モデル コンポーネント、ツールパスが表示されます。
現在アクティブな場所は 2D ビューと 3D ビューの両方で同じです。つまり、ベクター シェイプを作成すると、2D ビューまたは 3D ビューのどちらが使用されているかに関係なく、同じアクティブ シートとアクティブ レイヤーに配置されます。
ただし、各ビューの上部にある表示項目ツールバーを使用して、各ビューのオブジェクト タイプの表示を個別に切り替えることができます。これは、CNC プロジェクトの作成の各段階で、ジョブのさまざまな領域に焦点を当てるのに役立ちます。
ソフトウェアのツールの多くは、2D ビューまたは 3D ビューで直接使用できます。
V12では、一部のツールはまだ3Dで完全なインタラクションを可能にするように拡張されていません。これは進行中の移行です。疑問がある場合は、クリックしてみてください。
アートワークをインポート、描画、またはトレースする
コンピュータ画像は、ほとんどの場合、色付きの四角形のグリッドとして表されます。これらの画像はビットマップと呼ばれ、その構成要素である色付きの四角形はピクセルと呼ばれます。ごく一部の特殊なケースを除き、この表現はツールパスの作成に *直接* 役立ちません。コンピュータの図面 (CAD またはイラストレーション アプリケーションから) は大きく異なり、数学的に定義された線と曲線から作成されます。
このタイプの表現は、ベクター アートワークまたは輪郭アートワークと呼ばれます。Vectric ソフトウェアはビットマップとベクター アートワークの両方を使用できますが、ほとんどのタイプのツールパスはベクター描画からのみ作成できます。ただし、類似色の太字領域 (ロゴ、漫画、アイコン、記号など) を含む適切なビットマップを使用してベクターを作成し、そこからさまざまなタイプのツールパスを生成できます。このプロセスはビットマップ トレースと呼ばれます。
外部アートワーク ファイルの種類によっては、ビットマップのみが含まれるもの (BMP、PNG、JPG など) やベクターのみが含まれるものなどがありますが、両方が含まれるものも多くあります (PDF、SVG、DWG/DXF など)。
デザインアートワークを使用してツールパスを作成する
ベクター アートワークを使用して、カットする形状を定義します。ツールパス (意図した形状を残すためにマシンが行う実際の切削動作) が元のアートワークを直接変換することはほとんどないことを強調することが重要です。ツールパスは、材料、CNC マシンの機能、および切削ツールの形状の複雑な相互作用を考慮して作成する必要があります。
「彫刻は、本質的には世界で最もシンプルなものです。あなたがしなければならないことは、大きな大理石の塊とハンマーとノミを用意し、何を作ろうとしているかを決めて、不要な大理石をすべて削り取るだけです。」 - パリ・ゴロワ、1879年。
したがって、ツールパスはソース ベクター アートワークから生成されますが、一度作成されると、ツールパスはそれを作成したアートワークからほぼ完全に独立します。ツールパスの生成に使用されたソース アートワークを移動、編集、または削除しても、ツールパスには影響しません。変更を反映するには、ツールパスを積極的に再計算する必要があります。
これは慎重に検討された Vectric 設計原則です。ジョブに大幅な変更が発生したというメッセージが表示される場合がありますが、ツールパスが「知らないうちに」自動的に変更されることはありません。
とはいえ、ツールパスはそれを作成したアートワークへの便利な参照を保持しています。ツールパスを編集することを選択した場合、ツールパスは元のソース アートワークを見つけて再選択しようとします。この時点で、ソース アートワークに加えた変更を反映するように再計算するだけで済みますが、追加のアートワークやまったく異なるアートワークを選択することもできます。
プレビュー
すでに説明したように、形状を切断するために必要な CNC マシンの実際の動作 (ツールパス) は複雑で、解釈が難しい場合があります。
幸いなことに、このソフトウェアは、仮想材料のブロックでツールパスをシミュレートすることで、作成したツールパスの非常に正確なプレビューを提供します。サンプル プロジェクトでは、ツールパス プレビューを使用して、ツールパスが目的の形状を生成していることを確認します (生成されていない場合は簡単に修正できます)。
このシミュレートされたプレビューは、現実世界でのコストのかかるミス(誰もが時々犯すミス)を最小限に抑えることを保証する非常に有益なステップですが、さまざまな条件下でのさまざまな戦略から期待できる表面仕上げを確認することもできます。
ツールパス プレビューでは、CNC マシンに送信されるデータとまったく同じデータが使用されます。マシンで発生する切削や表面仕上げの問題がツールパス プレビューで ない 表示される場合、ほとんどの場合、マシンのセットアップまたはツールの物理的な問題が原因であることが確実であり、問題を見つけて修正する時間がはるかに短くなります。
ツールパスのエクスポート
これで、ツールパスを適切な形式でエクスポートして、CNC マシンのコントローラーにロードする準備が整いました。ツールパスを保存すると、CNC マシンに固有のポストプロセッサが使用されます。ポストプロセッサは、ツールパスに含まれる動作を、CNC マシンのコントローラーがロードして実行するために必要な特定の形式のツールパス ファイルに変換します。
04. はじめに - ワンタイムセットアップ
一度だけの設定
ただし、開始する前に、新しくインストールされたソフトウェアが正しく構成されていることを確認するために、1 回限りの手順をいくつか完了する必要があります。まず、Vectric のオンライン ポータルである V&Co にログインする方法を説明します。ここでは、他の多くのチュートリアルとプロジェクト、クリップアート パック、ソフトウェア アップデートをダウンロードできます。また、個人の製品ライセンス コードもここで見つかります。ライセンス情報を回復する必要がある場合や、将来何らかの理由でメインの製品インストーラーを再度使用する必要がある場合は、いつでもこの場所に戻ることができます。また、V&Co を使用してオンライン マシン データベースにアクセスします。これを使用して、CNC マシンのメーカーとモデルに合わせてソフトウェアを自動的に構成できます。通常、ソフトウェアのライセンスと構成は 1 回だけ完了する必要があり、オンラインであれば、数回クリックするだけでどちらもほぼ完全に自動的に完了します。
ライセンス管理と V&Co アカウント
弊社の高品質 CNC ソフトウェアへの投資が保護され、Vectric が今後も優れたソフトウェアを作成し続けることが重要です。そのため、購入したソフトウェアには固有の個人ライセンスが付与されます。
このライセンスは、Vectric V&Co アカウントに関連付けられており、 https://portal.vectric.comからいつでもアクセスできます。V&Co アカウントにログインするには、アカウントの作成時に登録したメール アドレス (お客様固有のものである必要があります) とパスワードを使用する必要があります。これらの詳細は安全に保管してください。登録したメール アドレスは、ソフトウェアの所有権を確認するための手段です。
重要な注意: 登録したメール アカウントと、V&Co ログイン ページにあるパスワードを忘れた場合のリンクを使用して、いつでもパスワードをリセットできます。登録したメール アドレスを変更する必要がある場合は、これを行うことが重要です 前に ソフトウェアが登録されているアドレスにアクセスできなくなります。登録したメールにアクセスできなくなった場合は、 support@vectric.com まで直接ご連絡ください。ただし、身元と購入を証明する独立した代替手段を提供する必要があることに注意してください。
V&Co アカウントには、購入した Vectric ソフトウェアごとに固有のデジタル コードがあります。ラップトップまたは PC で初めてソフトウェアを実行すると、この情報を入力するように求められます。オンラインのコンピューター (つまり、無制限のインターネット アクセスが利用できるコンピューター) にインストールする場合は、このプロセスをほぼ完全に自動的に完了できます。これが最も速くて簡単な方法です。
ソフトウェアは Web ブラウザを起動し、ポータル アカウントにログインするように要求します。その後、ソフトウェアはリンク可能な適切なライセンスを表示します。リンクを承認するだけで準備完了です。
初期インストール後にこのプロセスを完了すると、コンピュータを変更したり、ソフトウェアを新たに再インストールする必要がない限り、再度このプロセスを実行する必要はありません。ソフトウェアは、お客様専用のライセンスとなり、オフラインのときや、オンラインでもログインしていないときでも、お客様の詳細が常にメイン インターフェイスに表示されます。
また、インターネットに接続しているときはいつでもソフトウェア内から V&Co アカウントにログインして、クリップアート コレクションやオンライン ツール データベースなどの追加のオンライン機能やサービスを有効にすることもできます。
ログインすると、ソフトウェアのメイン ウィンドウの右上隅にその旨が表示されます。ソフトウェアの 1 回限りのライセンスと、ソフトウェアの使用時に定期的にログインすることは、独立した概念であることに注意してください。個人の製品ライセンスは、V&Co のログイン ステータスの影響を受けません。
また、インターネットに接続していなくてもソフトウェア ライセンス プロセスを完了できるようにしました。プロセスは自動ではなく、手順の詳細については、こちらを参照してください。
CNC工作機械の構成
ソフトウェアは数百種類の CNC マシンをサポートしているため、次に行う必要があるのは、特定のメーカーとモデルに合わせてソフトウェアを構成することです。正しい構成は、CNC マシンのツール データベース内の適切なツール設定と、特定のマシン ツール コントローラが理解できるツールパス ファイルを作成するために必要な「変換」ファイル (ポストプロセッサ) の設定という 2 つの要素で構成されます。
工具データベース
ソフトウェアを構成すると、カッター移動速度 (「送り速度」) を含むツール定義を含むデフォルトのツール データベースが作成されます。これは、各材料に対する CNC マシン メーカーの推奨事項に従って、お持ちのツール タイプのエントリを編集するための適切な開始点となるはずです。適切なツール設定は、ツールの形状と設計、切断する材料の性質、および CNC マシンの強度とパワーの複雑な相互作用の結果です。状況に適しているかどうかを最初に検討せずに、デフォルトの設定を使用しないでください。
ツール データベースについては、以下の「ツールパスの作成」セクションで詳しく説明します。
ポストプロセッサ
ソフトウェアは、数百種類の異なる CNC マシンおよびコントローラ用のツールパス ファイルを作成できます。これを実現するために、ソフトウェアはツールパスの内部表現を作成します。このツールパスが保存された場合にのみ、CNC マシンに必要な特定の形式に「変換」されます。
変換命令は、ポストプロセッサと呼ばれるファイルに含まれています (ツールパスが作成された後にそれを処理するため)。
ポストプロセッサは、ツールパスの動きをマシンに提示する際にメートル法とヤードポンド法のどちらを使用するかも決定します。これは通常、CNC マシンのコントローラで設定した単位モードと一致している必要があります (必要に応じて製造元に問い合わせてください)。ただし、ソフトウェア内で元のツールパスを作成するためにどの単位が使用されたかは関係ありません。ツールパスがポストプロセッサを通じて保存されるときに、必要な変換が自動的に適用されます。
ジョブ設定 - 軸方向
当社のソフトウェアは、3 軸 CNC マシン用に特別に設計されています (オプションの回転軸もサポートされています)。CNC マシンを見ると、左右の動きは X 軸で制御され、前後の動きは Y 軸で制御され、上下の動きは Z 軸で制御されるのが一般的です。
当社のソフトウェアでは、ジョブの幅は通常、CNC マシンの X 軸に相当し、ジョブの高さは Y 軸に相当します。
一部のマシンは、X 軸と Y 軸が入れ替わるように配置されていることに注意してください。つまり、左から右への動き 5月 は Y 軸によって制御され、その逆も同様です。
マシンの制御ソフトウェアを使用して、各軸でマシンを個別にジョグし、期待どおりに動作することを確認します。
珍しいことですが、一部のポストプロセッサでは、ツールパスを作成した X および Y ツールパス座標 後 が入れ替わって、ジョブの見かけの方向が実質的に変更される可能性があります。ただし、これは、マシンの構成と使用法に自信があるユーザーにのみ推奨され、これによって発生する可能性のあるその他の問題を認識していない大多数のユーザーには推奨されません。疑問がある場合は、工作機械メーカーに確認してください。
機械の前に立ったとき、機械をジョグで動かして X 位置を高くすると、機械が目の前で左から右に動くように方向を決めるのに役立ちます。これにより、ソフトウェアで作成したプロジェクト設計が機械のベッドにどのように変換されるかを視覚化できます。
はじめに - サンプルプロジェクト
キャリブレーションパターンのカット
簡単に紹介するために、2D プロファイル ツールパス戦略を使用して、正確なサイズと位置合わせが行われた長方形、円、星を彫刻します。このパターンでは、CNC ワークフローで概説したすべての手順を使用します。また、設計のいくつかのシンプルだが重要な機能を使用して、CNC マシンが正しく動作しているかどうかを確認することもできます。
- 長方形、円、星は歪んだり歪んだりしてはなりません。
- 彫刻された形状の寸法はデザインと正確に一致する必要があります。
- 3 つの図形の位置合わせポイントに矛盾があってはなりません。
- 星は時計回りにわずかに回転し、彫刻はデザインの元の方向と一致し、X または Y 方向に予期しない反射がないようにする必要があります。
このガイドの最後では、これらのチェックを確認し、いずれかが期待どおりでない場合のトラブルシューティングのヒントをいくつか提案します。
材料、工具、固定具
デザインの XY 寸法は 100 mm (4 インチ) なので、約 150 mm (6 インチ) 四方以上の材料が必要になります。
素材の正確な厚さはそれほど重要ではありません。デザインは、1.5 mm (1/16 インチ) の深さで表面に彫られるだけだからです。したがって、厚さが 3 mm (1/8 インチ) 以上であれば問題ありません。合板または MDF ボードの切れ端が理想的です。
クランプとの衝突やネジの切断の可能性を回避するために、このような小さな材料を固定するための最良の方法は、両面テープを使用することです。強力な「カーペット」タイプのテープであればどれでも使用できますが、しっかりと固定でき、作業が完了したらきれいに剥がせるブランドを見つけるために試行錯誤する必要があるかもしれません。
ツールパスは V ビットに基づいて作成されますが、正確なツール角度は重要ではありません。V ビット ツールがない場合は、小型 (3 mm、直径 1/8 インチ以下) のエンド ミルまたはボール ノーズ ツールも使用できますが、カットが広くなるため、キャリブレーション パターンの解釈が少し難しくなる可能性があります。
クランプとの衝突やネジの切断の可能性を回避するために、このような小さな材料を固定するための最良の開始方法は、両面テープを使用することです。
ジョブを作成する
- 開始するには、「新しいファイルを作成」をクリックします。
これにより、「ジョブ セットアップ」フォームが開きます。すべてのプロジェクトはジョブ セットアップから始まります。ここで、設計の物理的な寸法を検討します。この時点では、必ずしも材料ブロック全体を定義する必要はなく、設計に必要な領域のみを定義する必要があることに注意してください。設計領域は、CNC マシンが参照開始点として使用する「XY データム位置」を使用して、より大きな物理的な材料ブロック上の任意の場所に配置できます。
ソフトウェアのすべてのフォームと同様に、`Job Setup` フォームの上から下に向かって作業してください。フォームは通常、最も重要なフィールド、オプションではないフィールド、または最も頻繁に更新されるフィールドが上部に配置されます。ほとんどのフォーム フィールドには、初めてアクセスしたときに適切なデフォルトが提供されます (フィールドは、編集すると通常、以前の設定を記憶します)。そのため、最初はよくわからないフィールドを無視できます。ほとんどのフォームの下部には、変更内容の (承認)、 、または を実行するためのボタンがあります。
- ジョブ設定フォームでは、両側からカットするか、回転軸を使用してカットするプロジェクトを許可していますが、ここでは単に「片面」を選択します。
お客様のご希望に応じて「ジョブ サイズ」の単位を設定します。
CNC マシン コントローラは、ツールパスがメートル法またはヤードポンド法のいずれかで定義されていることを想定して設定されるため、特定の設定を決定するには CNC メーカーに問い合わせる必要があります。後で選択するポストプロセッサは、ツールパスをコントローラの要件に一致させる必要がありますが、これはソフトウェア内で 設計 に使用する単位とはまったく関係ありません。ツールパス ファイルの作成時に、必要に応じてすべてが自動的に変換されます。
- 新しいジョブの幅と高さを両方とも150mm(6インチ)に設定します。
- をセットする
- OKをクリック
キャリブレーションアートワークをデザインする
プロジェクトは設計図から始める必要があります。画面の左側には、設計図を描くのに役立つさまざまなツールにアクセスできるタブ付きパネルがいくつかあります。
やがて、この設計を使用して CNC マシンのツールパスの作成を開始します。ツールパスとツールパス戦略に関連する機能は、画面の右側にある別のパネルにあります。最初はこのパネルは非表示になっています。設計がほぼ完成したら、右側のツールパス パネルに焦点を切り替えます。
これは CNC プロジェクトを作成するときの一般的なワークフローであり、ソフトウェア インターフェイスにより、このフォーカスの切り替えが簡単かつ直感的になります。
今のところは、左側の デザイン パネルで利用できるツールに焦点を当て続けましょう。
######### キャリブレーション スクエアを完了するための手順は、こちらを参照してください。######
これにより、100m x 100mm の長方形が作成されます。
ここで、キーボードの F9 キーを押すと、長方形ベクトルが作業領域の中央に配置されます。
最初のツールパスを作成する
設計図が完成したので、この形状を正確かつ効率的にカットするためにどのようなツールパス戦略を使用するかを検討する準備が整いました。
ソフトウェア インターフェイスでは、「ツールパス コマンドに切り替える」ボタンを使用して、設計ツール パネルを自動的に非表示にし、ツールパス戦略ツール パネルを表示できます。
- 「デザイン」タブの上部にある「ツールパス コマンドに切り替える」ボタンをクリックします。
ツールパス タブがソフトウェアの右側に開きます。ここには、ツールパスの作成、編集、保存に関連するすべてのツールがあります。
特定のジョブに最も適したツールパス戦略を選択することは、CNC を効果的に使用する方法を最初に学習する際の最も難しい側面の 1 つです。時間の経過とともに、このタブで利用できるさまざまな戦略を探索し、広範なチュートリアルと実用的な例を通じて、それぞれの用途を理解します。
現時点では、ツールパス操作で利用できる最初の戦略、つまりプロファイル ツールパスのみを使用します。
プロファイル ツールパス ボタンをクリックして、2D プロファイル ツールパス フォームを開きます。
プロジェクトの保存と読み込み
この時点で、プロジェクトを保存する必要があります。[ファイル] -> [保存] メニュー、または Ctrl+S ショートカット キーを使用してプロジェクト ドキュメントを保存すると、他の従来のアプリケーション ドキュメント (Microsoft Word など) を保存するのと同じように、すべての 2D 設計要素、3D モデル、およびツールパス戦略設定が `*.crv` または `*.crv3d` ファイルに含まれます。このファイルは、後日いつでも戻って作業を継続したり、新しいプロジェクトのベースとして複製したりすることができます。
これは CNC マシンが読み取るファイルではないことに注意してください。ツールパスの保存 (下記参照) は、CNC マシンに必要なこのプロジェクトからファイルを具体的に保存する独立したプロセスです。ツールパスの保存プロセスを、Word 文書から PDF ファイルを作成するようなものと考えるとわかりやすいかもしれません。PDF ファイルは通常、再読み込みまたは編集されませんが、「印刷」する準備ができています。
ツールパスのプレビュー
ツールパス ファイルを CNC マシンに転送する前に、ソフトウェアで行うべき非常に重要な手順がまだあります。[ツールパスのプレビュー] コマンドを使用すると、CNC マシンがどのように動くか、各ツールパスが完了した後の素材がどのように見えるかを正確にプレビューできます。
ツールパスの保存 - 後処理
ツールパスの実行
このガイドでは、手動で、またはここに示すように既存の オンライン構成 のいずれかを使用して、「マシン構成」プロセスを完了していることを前提としています。
この手順が完了したら、ツールパス パネル アイコンの右下のアイコンを使用して、「ツールパスの保存」フォームを開くだけです。
マシンが現在マシンで選択されていることを確認してください
ツールパスの実行
CNC マシンとコントローラーはそれぞれ異なります。この時点では、ツールパス ファイルの実行の詳細については、CNC マシンの製造元のマニュアルを参照する必要がありますが、予想される典型的なプロセスに関する一般的な情報をいくつか提供できます。
資料を安全に保管
材料はマシンのベッドに固定する必要があります。これは通常、材料をクランプ、ネジ留め、または接着して行います (大型またはより高度なマシンには真空固定機能がある場合があります)。最初の 2 つのケースでは、クランプやネジを切断しないように細心の注意を払う必要があります。ジョブ セットアップで説明したように、ツールパス ファイルは材料と同じサイズである必要はありません。クランプやネジを回避する最も簡単な方法は、ジョブの寸法 (つまりツールパス) が材料の遮るもののない領域よりも大きくないこと、およびこの領域内に正しく配置されていることを確認することです。
原点(データム)を設定する
すべてのツールパスの動きは、最初にジョブを作成したときに選択した「XY データム位置」を基準にしています (この例では左下隅に設定していますが、通常はデザインの中心にすることもできます)。これらは「原点」とも呼ばれます。次に、このデータム ポイントが材料上のどこに物理的に配置されているかを CNC マシン コントローラに指示する必要があります。このプロセスは通常、「XY データムの設定」、「XY 原点の設定」、または「X と Y のゼロ設定」と呼ばれます。
実際には、XY データムを設定すると、ツールパスが材料上でカットされる位置が どこ になります。
また、ツールパスが材料をどのように 深い 切削するかをコントローラに指示する必要があります。これは、ツールパスを材料に対して 内で 配置することと同じです。これは、「Z 原点の設定」、「Z ゼロの設定」、または「Z のゼロ化」と呼ばれることがよくあります。
この時点でも、ソフトウェアでジョブを作成したときに使用した「Z ゼロ位置」設定を把握しておくことが重要です。この例では、これを材料の表面に設定しましたが、状況によっては、これを材料ブロックのベース、または CNC マシンのベッドに設定すると便利な場合があります。
このジョブは `Z ゼロ位置` を `Material Surface` に設定して作成されたため、ツールの先端が 材料の表面 に触れるように CNC マシンをジョグし、制御ソフトウェアを使用して Z 位置をゼロにする必要があります。
あるいは、自動 Z タッチ プレートまたはプローブを使用して同じ結果を得ることもできます。この手順の手順については、CNC 製造元を参照してください。
注記: テストの「エアカット」を行う場合、CNC マシンを Z方向上向き 空中のポイントまで後退させて、ツールパスの最大深さが物理的な材料に接触しないようにし、代わりに Z ゼロを「空中」に設定します。このように Z 原点を空中にしてツールパスを実行すると、実際の切削の前にセットアップやツールパス設定について疑問や不確実性がある場合に、ツールパスの動きをテストするのに非常に役立ちます。
この時点で、CNC マシンは、ツールの先端が原点ジョブの作成時に定義した位置にあるときに、位置インジケーターが X=0、Y=0、Z=0 を示している状態になっているはずです。この例では、これは切断する領域の左下隅にあり、材料の上面にちょうど触れている位置になります。
ツールパスファイルをロードする
準備はできましたか?
少なくとも、テストされていないツールパスの初期開始点と送り速度を「エアカット」で目視確認することを常に検討する必要があります (上記の注記を参照)。最初の全深さ、全幅カットを形成する動きに特に注意を払ってください。これは、ツールと CNC マシンに最も大きなストレスがかかるときであるため、カットしようとしているツールと材料の種類に対して適切であることを確認してください。
CNC を初めて使用する場合、コントローラーに簡単なチェックリストを書いておくことを検討する価値があります。次に例を示します。
私は:
- 初期動作を確認するために「エアカット」を実行しますか?
- 材料がしっかりと固定されているか確認しましたか?
- このツールパスに適したツールのタイプと形状が適切かどうか確認しましたか?
- X、Yの原点を設定しますか?
- Z原点を設定しますか?
- スピンドルをオンにしましたか (CNC マシンのコントローラーによって自動的に有効になっていない場合)?
さあ、カットの時間です!
テストされていない、または検証されていないツール設定でツールパスを実行する場合は、常に細心の注意を払ってください。 新しい のツールや 新しい の材料で切削する場合は、CNC マシンまたはツールの製造元に問い合わせて、マシンとツールの適切な送り速度についてアドバイスを受けてください。
キャリブレーションカットを確認する
トラブルシューティング
スケール / 単位
私のデザインは、設計よりもはるかに小さく/大きく切り取られます。
コントローラに手動でX=0からX=1にジョグするように指示したときに、マシンが移動する距離を再確認してください。
移動距離は正確に 1 インチまたは 1 mm である必要があります。
1 インチ移動する場合は、 VCarve Pro からツールパスを保存するときに、インチ ポスト プロセッサを使用していることを確認する必要があります。
同様に、1mm 移動する場合は、代わりに MM ポスト プロセッサを使用します。
これらのオプションのいずれかではなく、異なる距離を移動する場合は、機械のサプライヤーの支援を受けて機械のキャリブレーションを確認する必要があります。
XY 軸と Z 軸のそれぞれでこれを再確認すると、すべての軸で正確に同じ距離移動する必要があります。
反発
バックラッシュは、機械の物理的な問題であり、軸は切断のために正しい距離を移動しますが、軸モーターまたはネジベアリングの緩みにより滑ってしまいます。
これは時間の経過とともに蓄積され、ツールパスの実行中、マシンの位置ずれが徐々に大きくなります。通常、1 方向のカットのみに不正確さが見られる場合、その軸にバックラッシュの問題があります。
ハードウェアのバックラッシュを排除する方法についてアドバイスを得るには、この問題をマシンのサプライヤーに報告してください。
反転軸
軸が反転していることを示す最も一般的な兆候は、テキストが一方向に反転していることです。まれに、ルーターが沈み込むべきときに上昇し、Z ゼロが正しく設定されているにもかかわらず、空気を切断してしまう場合があります。これは、次のようないくつかの要因が原因である可能性があります。
- ハードウェア配線。
- コントローラーのセットアップ。
- ポストプロセッサのセットアップ。
このような場合、最初にハードウェア配線をチェックして、マシンのハードウェアがすべて意図したとおりに接続され、配線に問題がないことを確認します。モーターのプラス端子とマイナス端子が逆になっていると、モーターが逆回転することがあります。
コントローラーの設定はコントローラーのキャリブレーションの一部であり、ここで値が逆転すると、モーターが逆方向に動作する可能性があります。
ポスト プロセッサの設定では、軸の反転が必要になる場合があります。これは、マシン サプライヤーがマシンの構成に合わせるために要求したものです。ポスト プロセッサは通常、手動で反転することはなく、マシン サプライヤーの仕様に合うように設定されます。まれに、上記のポイントでは修正できない CNC マシンに合わせて変更する必要がある場合は、 ポストプロセッサの編集 が役立ちます。
2Dデザインと管理
2D ビューは、完成したパーツのレイアウトを設計および管理するために使用されます。厳密に 2D であるアイテム、または 3D ビュー内のオブジェクトの 2D 表現であるアイテムをユーザーが制御できるようにするために、さまざまなエンティティが使用されます。これらの 2D ビュー エンティティのリストについては以下で簡単に説明し、このマニュアルの後のセクションで詳しく説明します。
これらすべてのさまざまなタイプのオブジェクトの最終的な目的は、CNC 上で必要な部品を切断するために必要なツールパスを作成できるようにすることです。これは、これらが 3D モデルの基礎を作成するのに役立つこと、またはツールパスの境界形状の記述など、ツールパスにより直接的に関連していることを意味する場合があります。これらの 2D アイテムのさまざまな用途や用途は、それらの整理が非常に重要であることを意味します。このため VCarve Pro には 2D データを管理するための レイヤー機能 があります。レイヤーは、さまざまな 2D エンティティを関連付けて、ユーザーがそれらをより効果的に管理できるようにする方法です。レイヤーについては、このマニュアルの関連セクションで後ほど詳しく説明します。両面プロジェクトを使用している場合は、同じセッション内で「上」面と「下」面を切り替えることができ、各面でデータを作成および編集できるようになり、「多面ビュー」オプションを使用して次のデータを表示できます。反対側のベクトル。両面セットアップについては、このマニュアルの関連セクションで後ほど詳しく説明します。
ベクトル
ベクトルは線、円弧、曲線であり、直線のように単純なものもあれば、複雑な 2D デザインを構成することもできます。 VCarve Proでは、ツールパスが従う形状を記述したり、デザインを作成したりするなど、多くの用途があります。 VCarve Pro には、このマニュアルで説明されている多数のベクター作成および編集ツールが含まれています。
多くのユーザーは、ソフトウェア内でベクターを作成するだけでなく、Corel Draw や AutoCAD などの他の設計ソフトウェアからベクターをインポートすることもあります。 VCarve Pro はインポート用に次のベクトル形式をサポートしています: *.dxf、*.eps、*.ai、*.pdf、*skp、および *svg。インポートしたデータは、ソフトウェア内のベクター編集ツールを使用して編集および結合できます。
ビットマップ
ビットマップは*.bmp、*.jpg、*.gif、*.tif、*.png、*.jpegのピクセルベースのイメージ(写真など)の標準のコンピューター用語です。これらのファイルタイプは非常に小さな正方形(ピクセル)に構成されるイメージで、スキャンされた写真、デジタル写真、インターネットから入手したイメージなどが相当します。
3D モデルを簡単に操作できるようにするために、 VCarve Pro では、ユーザーがデザインをコンポーネントと呼ばれる管理可能な部分に分割できる方法を使用しています。 2D ビューでは、コンポーネントはグレースケール形状として表示され、これを選択して編集して、位置を移動したり、サイズを変更したりできます。グレースケールの操作については、このマニュアルで後ほど詳しく説明します。ビットマップと同様、ベクトル編集ツールの多くは、選択したコンポーネント グレースケールでも機能します。
07. 中級 - 3Dデザインと管理
VCarve Pro は、2D 図面から直接ツールパスを作成するだけでなく、非常に柔軟な 3D ツールパスを作成できます。これらのツールパスは、3D コンポーネントと呼ばれる 3D 設計要素から作成されます。3D コンポーネントは、外部 3D 設計パッケージで作成されたモデルから生成したり、3D クリップアートとしてインポートしたり、2D アートワークをソースとして使用して VCarve Pro 内から完全に構築したりできます。
3D ビュー
3D ビューでは、現在の複合モデル (現在表示されている 3D コンポーネントとレベルのすべてから構築されます)、ツールパス プレビュー (プレビューと呼ばれるツールパスから結果として得られる物理オブジェクトの高精度 3D シミュレーション) を表示できます。マテリアルブロック)。これらのどれが現在表示されているかは、3D コンポーネントとツールパスを含むパーツがあるか、2D データのみを含む何かを作業しているかによって異なります。
[ツールパス] タブで 工具経路をプレビュー フォームを開いているときは常に、3D ビューには複合モデルの代わりにプレビュー マテリアル ブロックが表示されます。 2D データと 2D または 2.5D ツールパスのみを含むパーツで作業している場合にこれを閉じても、プレビュー マテリアル ブロックが表示され続けます。パーツに表示可能な 3D コンポーネントが含まれている場合、プレビュー ツールパス フォームを閉じるとすぐに、3D ビューでの複合モデルの表示に戻り、シミュレーションが非表示になります。これらの項目に加えて、3D ビューでは計算されたツールパスの線画を表示できます。これらの計算されたツールパスの表示は、ツールパス名の横にあるチェックボックスを使用して、[ツールパス]タブのツールパス リストから制御できます。両面環境で作業している場合は、 多面図 オプションを使用して 3D ビューでプロジェクトの両面を表示できます。
複合モデル
VCarve Pro は、ユーザーが非常に複雑なプロジェクトでも簡単に作成できるように設計されています。どのような状況においても、複雑なものを作成するための最善のアプローチは、理解して管理できる単純さのレベルに達するまで、それを小さな部分に分割することです。 VCarve Pro では、これは、ユーザーがデザインの一部を操作して、それらを組み合わせて完成品を作成することで実現されます。ソフトウェアの用語では、これらの部分はコンポーネントと呼ばれます。コンポーネントを整理しやすくするために、コンポーネントはレベルに割り当てられます。必要な要素がすべて揃うまで、段階的にコンポーネントとレベルを作成および変更できます。以下の画像では、これがどのように機能するかの例を示しています。左側にはブドウの房のモデルの個別のコンポーネントが表示され、右側には完全なパーツを作成するために配置されたこれらのコンポーネントが表示されます。この結果の組み合わせを複合モデルと呼びます。
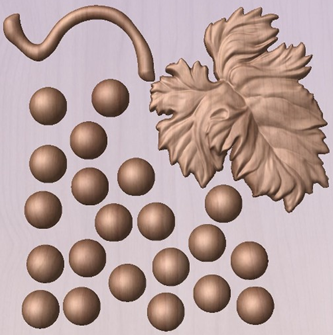

コンポーネントまたはレベル上のコンポーネントをどれだけ単純または複雑にするかに制限はありません (これはユーザーの選択です)。示されている例では、ブドウの房全体のモデルが小さな個々のコンポーネントで構成されていることがわかりますが、それらを組み合わせて 1 つの単一のコンポーネント (組み立てられたブドウの房) として存在することもでき、これを次の目的に使用できます。複数のブドウの房を含むより複雑な部分をレイアウトします。また、すべてのブドウを 1 つのレベルに配置し、葉と茎を別のレベルに配置して、形を管理および操作する別の方法を提供するように整理することもできます。各ユーザーは、特定の仕事やモデリング ツールの習熟度に応じて、自分が快適に使用できるコンポーネントの使用レベルとレベルを見つけます。
3D コンポーネントとレベル
VCarve Proの目的は、組み合わせて完成した 3D パーツを作成するコンポーネントとレベルのセットを完成させることです。これを考える 1 つの方法は、3D コラージュまたはアセンブリを構築することに似ています。デザインが進化するにつれて、新しいレベルやシェイプを作成したり、既存のレベルやシェイプを変更したりする必要がある場合があります。コラージュのパーツは、後で詳しく説明するコンポーネント ツリーで管理されます。
コンポーネントの作成と編集
既存のコンポーネントをコピーしたり、スケール変更したり、オブジェクトとして他の編集を実行したりすることができます。ユーザーは、他のコンポーネントとの関係を変更することもできます。たとえば、コンポーネントを上に置くか、別のコンポーネントの重なり合う領域にブレンドするかなどです。これらの部品の形状、位置、関係によって、最終的な部品の外観が決まります。ジョブが進行するにつれて、ユーザーは新しいコンポーネントを作成するか、新しい形状を追加したり、他のコンポーネントと組み合わせたり、スカルプトしたりして既存のコンポーネントを編集する必要があります。
コンポーネントは次の方法で作成および編集できます。
- モデリング ツールを使用して、2D ベクトルから形状を作成します。
- 事前に作成した 3D モデルをインポートします。これは、Aspire で以前に作成したモデル、またはクリップアート ライブラリや別のモデリング パッケージなどの別のソースからのモデルのいずれかです。
- ビットマップ画像から「テクスチャ」コンポーネントを作成します。
- コンポーネント分割ツールを使用して、既存のコンポーネントを複数の部分に分割します。
これらの方法はすべて、トレーニング資料全体で詳しく説明されています。
動的プロパティ
各コンポーネントには、基礎となる 3D 形状があるだけでなく、実際の形状を永続的に変更することなく自由に変更できる多数の動的プロパティもあります。これらには、コンポーネントの高さのスケーリング、コンポーネントを傾ける機能、またはコンポーネント全体に段階的なフェードを適用する機能が含まれます。
これらの動的プロパティは、モデリング プロセス中いつでもリセットまたは変更できるため、コンポーネントを組み合わせて最終的な複合モデルを形成するときに、コンポーネントを「微調整」する特に便利な方法になります。
結合モード
結合モードは、Aspire 内で 3D 形状を操作する場合に非常に重要な概念です。結合モードのオプションは、新しいシェイプを作成するとき、およびコンポーネント リストでコンポーネントとレベルがどのように相互作用するかを決定するときにも表示されます。これを該当するすべてのセクションで説明するのではなく、一般的な概念を理解できるようにここでオプションを要約する価値があります。
デザインのコンポーネント部分や、既存の形状があり新しい形状を作成する場合など、複数の 3D 形状がある場合、追加のエンティティがどのように相互作用するかをソフトウェアに伝える方法が必要です。初め。これは、3D を初めて使用するユーザーにとっては抽象的な概念になる可能性がありますが、できるだけ早い段階で理解することが重要です。 Aspire では、これは結合モードと呼ばれる選択肢によって制御されます。
これには、加算、減算、高位マージ、低位マージの 4 つのオプションがあります。
モデリングは芸術的かつ創造的なプロセスであるため、それぞれをいつ使用するかを説明する一般的なルールはありません。ただし、ガイドとして、2 番目のシェイプの領域が元のシェイプの範囲内に完全に収まる場合は、おそらく加算または減算を行うことになり、シェイプが部分的にのみ重なっている場合は、おそらく Merge を使用するか、ごくまれに Low を使用することになると想定できます。
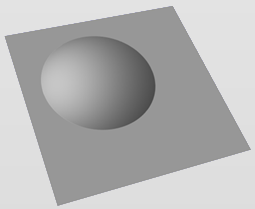
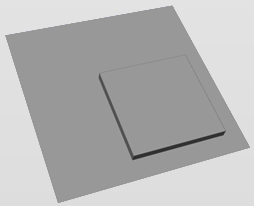
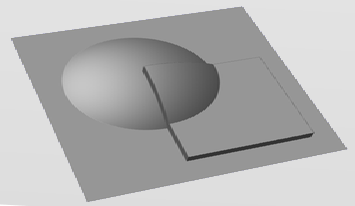
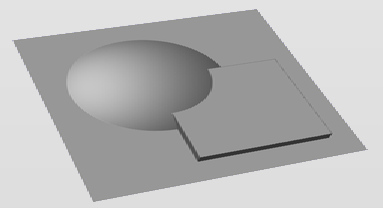
4 つのオプションとその具体的な効果については、次のページで説明します。さまざまな効果を説明するために、重なった面取りされた正方形とドームの組み合わせが使用されます。右上の画像で、これらが 2D ビューでどのように配置され、どのように重なっているかがわかります。次に、中央と右の下の画像で個々の形状を確認できます。これらの形状は、さまざまな結合モードを示すために使用されます。どの場合でも、ドームは主な形状とみなされ、正方形は最初の形状と結合される二次的な形状と見なされます。ドーム/正方形の例に加えて、実際のプロジェクトでこれらをどのように使用できるかを理解するために、「現実世界」の部品のいくつかの画像も含まれています。
個々のシェイプを操作するだけでなく、結合モードもレベルに割り当てられます。これらは、1 つのレベル上のすべての個々のコンポーネントの組み合わせが、コンポーネント ツリー内のその下のレベルのすべてのコンポーネントの結果とどのように相互作用するかを制御します。
注記
Multiply というコンポーネントを作成した後、マウスの右クリック メニューから利用できる 5 番目の結合モードがあります。この結合モードには専門的なアプリケーションがあり、適切なチュートリアル ビデオで説明されています。このオプションは文字通り、結合されるコンポーネントまたはレベルの高さを乗算して、新しい複合 3D 形状を作成します。
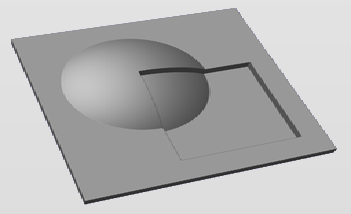
追加
[追加] を選択すると、最初の形状が取得され、2 番目の形状の高さが最初の形状の上に直接追加されます。重なり合う領域はすべて、その点での各形状の高さを足し合わせた正確な形状を作成します (以下を参照)。

通常、追加オプションは、追加されるシェイプが元のシェイプ内に完全に収まる場合に主に使用されます。これにより、(例に示すように) 部分が部分的にのみ重なる不均一な遷移が発生しないことが保証されます。
上の例は、「モデリング入門」ドキュメントの看板サンプルのドーム コンポーネントに追加されているカエデの葉と境界線の押し出しコンポーネントを示しています。
差
[減算] を選択すると、最初の形状が取得され、最初の形状から 2 番目の形状の高さが削除されます。重複する領域は、元の高さ/形状から 2 番目の形状を差し引いた組み合わせになります。形状が背景に入る領域はネガティブ領域になります。以下の画像のドームと正方形を使用すると、これがどのように見えるかを確認できます。
通常、削除は、追加オプションと同様、主に、削除されるシェイプが元のシェイプ内に完全に収まる場合に使用されます。これにより、(例に示すように) パーツが部分的にのみ重なる不均一な遷移が発生しないことが保証されます。
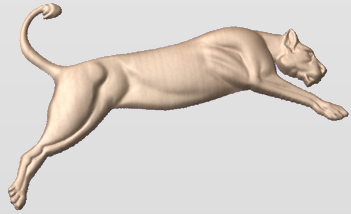
上に示した画像には、雌ライオンの筋肉を明確にするためにいくつかの「しわ」が加えられています。これらの凹部を作成する形状は、凹部領域を表すベクトルに対して [形状の作成] ツールで [減算] オプションを使用して作成されました。
マージ
[マージ] オプションを選択すると、重なり合わない形状の領域は同じままになります。重なり合う領域は互いに溶け合い、それぞれの最も高い領域が表示されたままになります。これにより、一方の形状が他方の形状に結合したように見え、事実上、ブール結合演算となります。以下の画像のドームと正方形を使用すると、これがどのように見えるかを確認できます。
通常、結合オプションは、結合される形状が元の形状と部分的に重なる場合に使用されます。これにより、それらの間で合理的な移行を行うことができます。
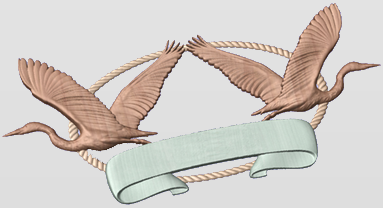
上の画像は、2 匹のサギ、ロープの境界線、およびバナーのコンポーネントを示しています。これらはそれぞれ他のものと重複するため、この領域でマージするように設定されています。合併した 2 つの領域のうち、高いほうの領域が目立つようになります。この場合、ロープはすべてよりも低く、バナーはアオサギよりも高いため、目的の効果が達成されます。
低
[低] オプションは、コンポーネントを結合する場合にのみ使用できます (モデリング ツールでは使用できません)。このモードを選択すると、重なり合わない領域は元の 2 つの形状のまま残されます。重なり合う領域はすべて、各形状から取得された最低点である新しい形状を作成します。これは事実上、ブール交差演算です。以下の画像のドームと正方形を使用すると、これがどのように見えるかを確認できます。
「低」オプションは、形状を凹ませて隆起した形状にするために使用されます。この例を上の画像に示します。
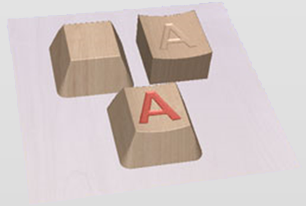
上の右側に示す例では、「低」オプションを使用して、左側の平らな上部の「ボタン」コンポーネントと右側の「A」の文字が付いた湾曲した上面コンポーネントを組み合わせています。両方のコンポーネントをマージ・ロー・オプションと組み合わせると、下の行に見られるように上部が湾曲したキーボード・ボタンが得られます。
レベルミラーモード
コンポーネント ツリーで [レベル] を右クリックすると、クリックしたレベルに関連するコマンドと操作を提供するポップアップ メニューが開き、この方法でミラー モードを設定できます。レベルにミラー モードが設定されている場合、 すべて そのレベルに含まれるコンポーネントは、移動、変換、または編集されるときに動的に継続的にミラーリングされます。ミラーリングは非破壊的です。つまり、いつでもオンまたはオフにすることができ、基礎となるコンポーネントを永続的に変更することはありません。ミラー モード レベル内での作業は、デザインの半分 (または 4 分の 1、以下を参照) のみを編集することで、複雑な対称パターンを実現する簡単な方法です。
利用可能なミラー モードは、大きく 2 つのグループに分かれています。最初のグループは 1 つの対称面を適用します。
- 左から右
- 右から左に
- 上から下へ
- 下から上
これらのモードを使用すると、ジョブの半分で作業し、残りの半分は自動的かつ動的に生成されます。たとえば、左から右モードでは、ジョブの左半分にコンポーネントを配置し、それぞれのミラー化された同等のコンポーネントがジョブの残りの半分に作成されます。この「反映」は作業中に動的に更新されます。
もう 1 つのグループは、2 つの対称面 (水平および垂直) を提供します。
- 左上の象限
- 右上象限
- 左下の象限
- 右下の象限
これらのモードを使用する場合、コンポーネントはすべてジョブの象限 (四半期) に存在する必要があります。水平方向と垂直方向のミラー反射が、ジョブの他の象限に自動的に作成されます。
実際の動作を確認するには、このビデオをご覧ください。
多面図

両面環境で作業する場合、コンポーネントを面ごとに個別に作成したり、右クリック オプションを使用してコンポーネントを反対側にコピーまたは移動したりできます。 「多面ビュー」で作業するオプションを選択すると、3D ビューの上面と下面にあるコンポーネントを表示できるようになります。上面と下面のツールパスを含むプロジェクトのツールパス プレビュー フォームでは、多面ビューにより両面のツールパス プレビューのシミュレーションも表示されます。多面ビューが選択されていない場合は、「すべての面をプレビュー」を使用できます。 [ツールパス プレビュー] フォームのオプションを使用して、3D ビューで上部と下部のツールパスを表示します。両面セットアップについては、このマニュアルの関連セクションで後ほど詳しく説明します。
ロータリージョブの作成
Z原点
ツールを円柱の中心またはサーフェスの中心にゼロ調整するかどうかを指定することを選択できます。ブランクを丸めている場合、参照している表面は完成したブランクの表面であるため、円柱の表面に Z を設定することはできません。一貫性と精度を確保するために、ラップされたツールパスを出力するときは常に「円柱の中心」を選択することを強くお勧めします。これは、加工しているピースの直径の不規則性やブランクをチャックの中心に配置する際のエラーに関係なく、常に一定に保つ必要があるためです。
ヒント:
これを行うための役立つヒントは、チャックの中心と、チャックの上部や回転軸取り付けブラケットの一部などの便利な点の間の距離を正確に測定することです。この Z オフセットをどこかに書き留め、この時点で将来のツールをゼロにし、Z オフセットを入力して回転軸の中心の位置を取得します。 「Center of Cylinder」を選択するもう 1 つの理由は、一部のコントロールでは回転中心からの距離に基づいて回転軸の正しい回転速度を計算できるためです。 Z 値がサーフェスを基準にしている場合、コントロールは Z ゼロにおける円柱の直径または半径を知る必要があります。
XY原点
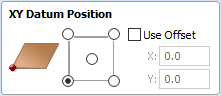
XY 図面原点 - ここで、XY ゼロ原点をジョブ上に配置する場所を指定できます。これらのオプションは、プログラム内の通常の「ジョブ設定」フォームの同じフィールドに対応します。ほとんどの人はデフォルトの左下隅を使用しますが、ジョブによっては XY 原点を中心にしたい場合があります。
- 水平方向 (X 軸沿い) のジョブでは、X オフセットは円柱の長さに対応し、Y オフセットはその円周に沿った点になります。
- 垂直方向 (Y 軸沿い) のジョブでは、その逆になります。 Y オフセットは円柱の長さに対応し、X オフセットはその円周に沿った点になります。
方向
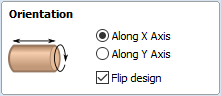
シリンダの方向に沿って - このセクションは、マシン上で回転軸をどのように調整するかをプログラムに伝えるために使用されます。すでにデザインを作成していて、別のマシンのジョブを変更したいだけの場合は、マテリアルを使用してデザインを反転して、すべてのベクトルとコンポーネントがジョブに対して同じままになるようにすることができます。
Z原点オン - このセクションでは、Z 原点をマテリアルの表面に設定するか、ベース (円柱の中心) に設定するかを決定します。これらの設定は、ツールパスが実際に保存されるときに上書きできますが、回転加工には「円柱軸」を選択することを強くお勧めします。この理由については、以下のメモで詳しく説明します。
ベクトルレイアウト
ツールパスのラッピングに適したサイズでジョブを作成するだけでなく、ジョブの作成時に多数のベクトルが作成されます。これは、ラップされたジョブの作成時に非常に役立ちます。
ベクターは独自の個別のレイヤー上に作成され、作業領域が乱雑にならないように、デフォルトではこれらのレイヤーはオフになっています。レイヤーをオンにするには、「レイヤーコントロール」ダイアログを表示します(Ctrl + L はこれを表示/非表示にするショートカットです)。レイヤーを表示/非表示にするには、レイヤー名の横にあるチェックボックスをクリックするだけです。
2レールスイープ - このレイヤーには 2 つの直線ベクトルが含まれており、成形柱を作成する場合にプロファイルをスイープするために使用できます。
境界ボックス - このレイヤーには、ジョブ領域全体をカバーする長方形のベクトルが含まれています。このベクトルは、円柱の表面全体を加工する場合に役立ちます。
素材の選択
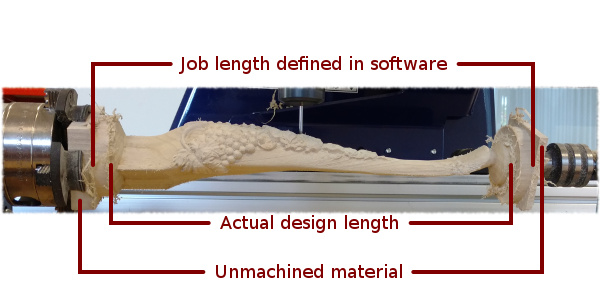
回転プロジェクトをセットアップするとき、ソフトウェアは正確な直径を持つ完全な円柱を想定します。実際には、ストック材料が不均一である場合や、正方形のプロファイルを持つブランクのみが利用可能な場合があります。このような場合、実際の設計に関連付けられたツールパスを実行する前に、ブランクを希望のサイズのシリンダーに機械加工する必要があります。
もう 1 つの考慮事項は、ストック素材の長さです。通常、ブランクの一部はチャック内に配置されます。加工中、切削工具が常にチャックと心押し台の両方から安全な距離にあることも重要です。このような理由から、ブランクは実際のデザインよりも長くする必要があります。切断用に機械をセットアップするときは、工具がチャックや心押し台にぶつからないように、原点が適切に設定されていることを確認するために細心の注意を払う必要があります。
これらの考慮事項を考慮せずにデザインが作成された場合、空白のサイズはいつでも ジョブセットアップ 形式で調整できます。
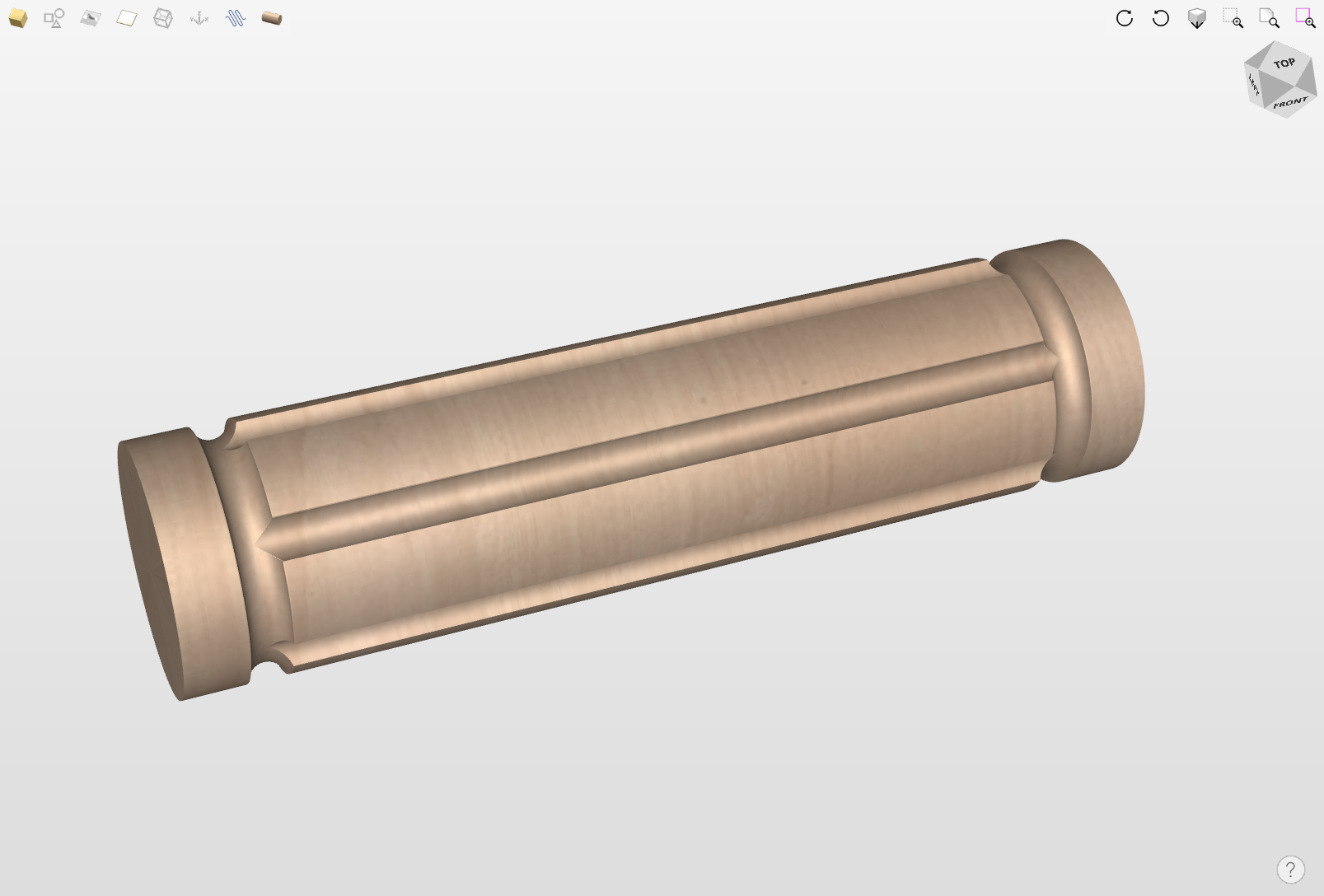
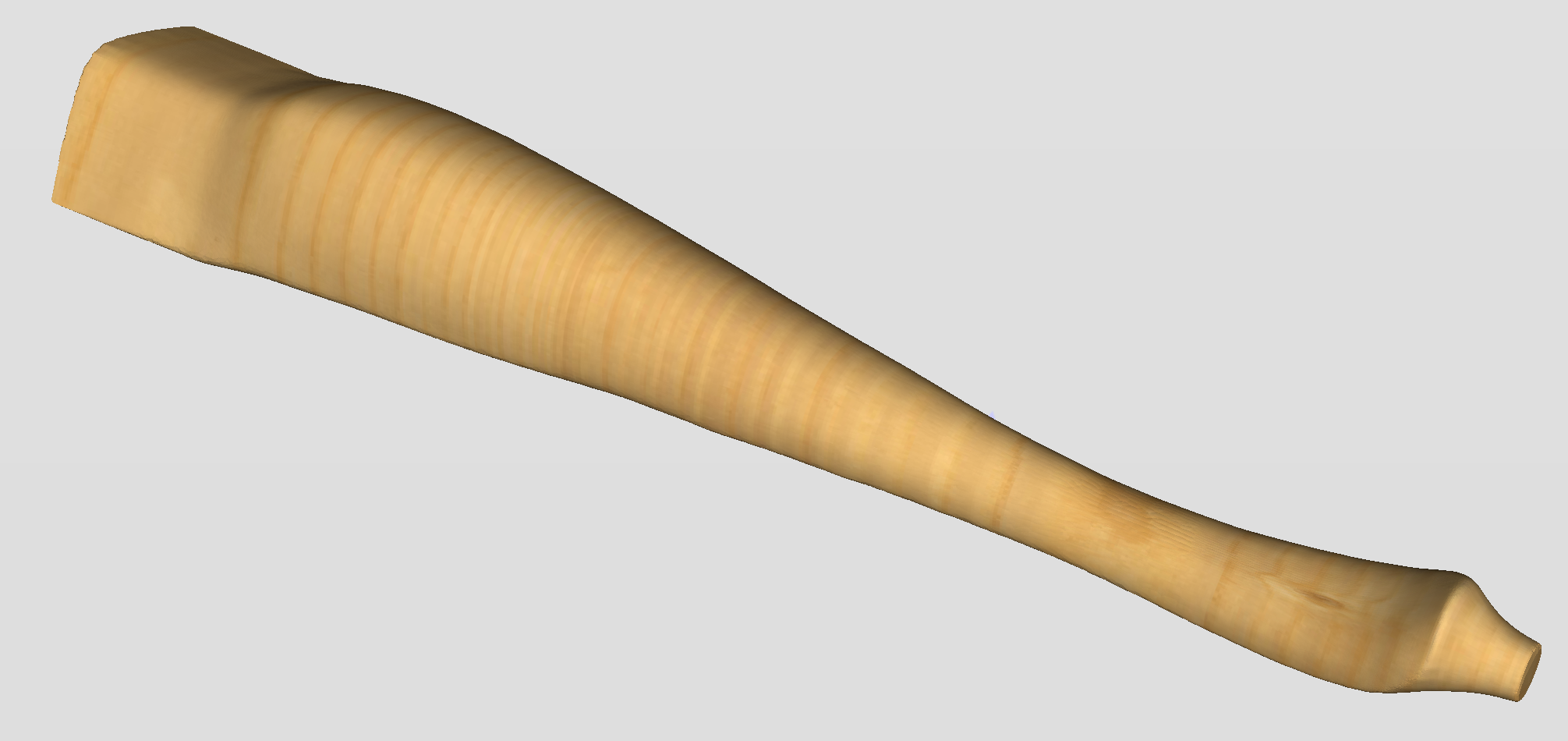
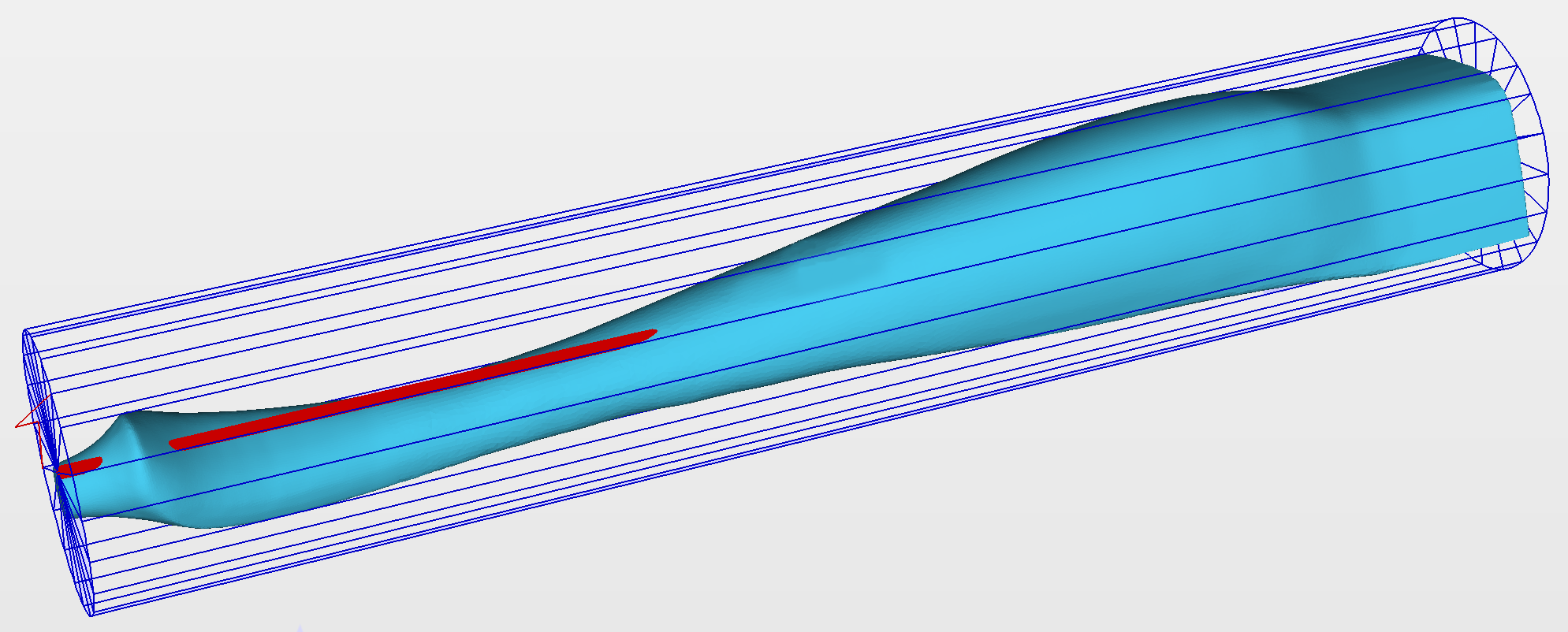
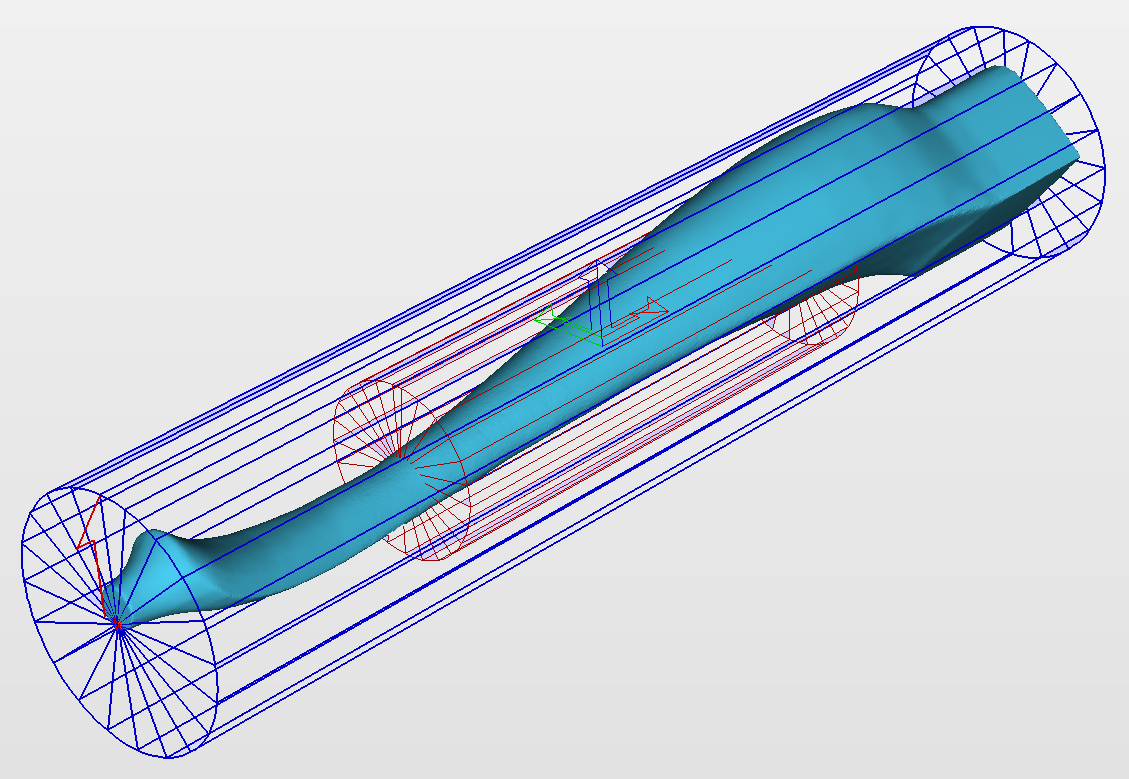
下の図は、ロータリー プロジェクト レイアウトの例を示しています。上で説明したように、チャックと十分なギャップを考慮して、実際のブランクは Aspire で定義されたジョブよりも長くなります。実際の設計は、完成した部品をチャックから取り外す前にプロファイル ツールパスで加工できるタブ用のスペースを残すために、Aspire で定義されたジョブよりも短くなります。
以下の例のように厚みの異なる 3D 形状を加工する場合は、モデルの厚い方の端を駆動モーターに最も近い側に配置することをお勧めします。このように、ねじりねじりは主に機械加工された部品のより強い端部に影響を与え、機械加工中の部品の曲がりや破損を避けるのに役立ちます。
2D ツールパスを使用したシンプルなロータリー モデリング
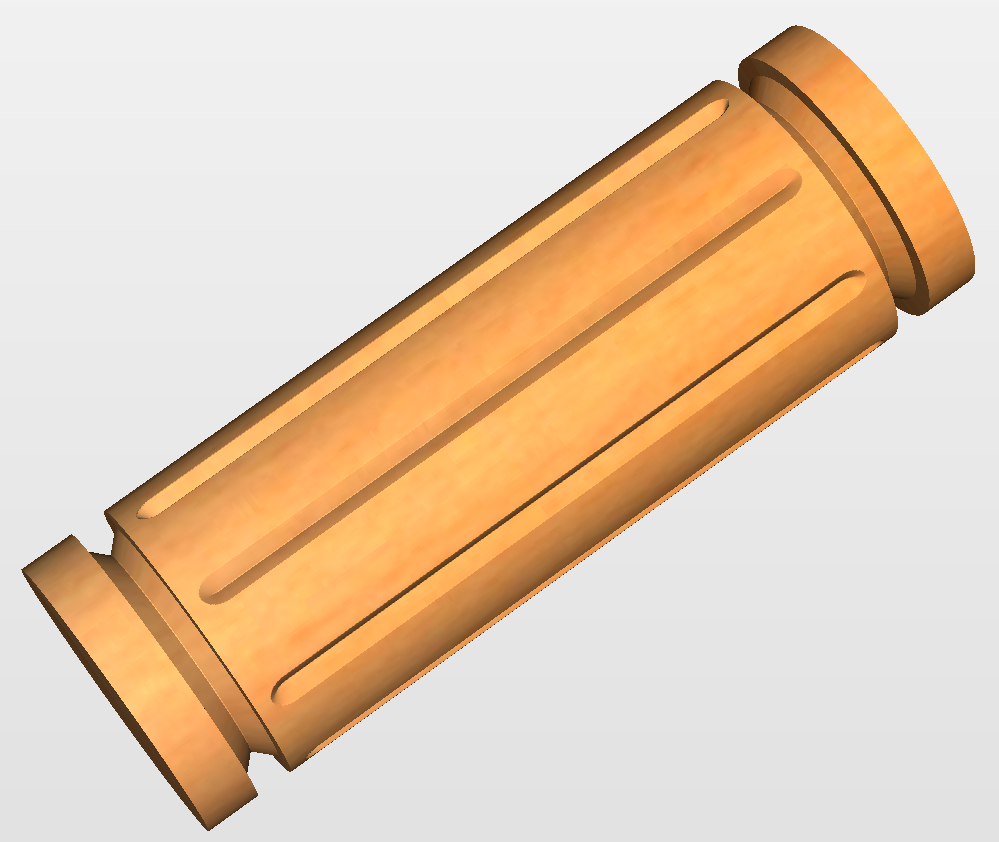
基本的な列のベクトルの作成
このセクションでは、プロファイルと溝加工ツールパスを使用して単純な柱を作成する方法を説明します。
新しいロータリー ジョブの作成から始めてください。ここに示されている設定は単なる例であり、マシンのセットアップと利用可能な材料に合わせて調整する必要があることに注意してください。
この例では、ブランクは X 軸を中心に回転します。これを 回転軸と呼びます。ラップされる軸は Y 軸です。これを 巻き付けられた軸と呼びます。これは、2D ワークスペースの上部と下部の境界が実際には一致することを意味します。それらを 包まれた境界線と呼びます。
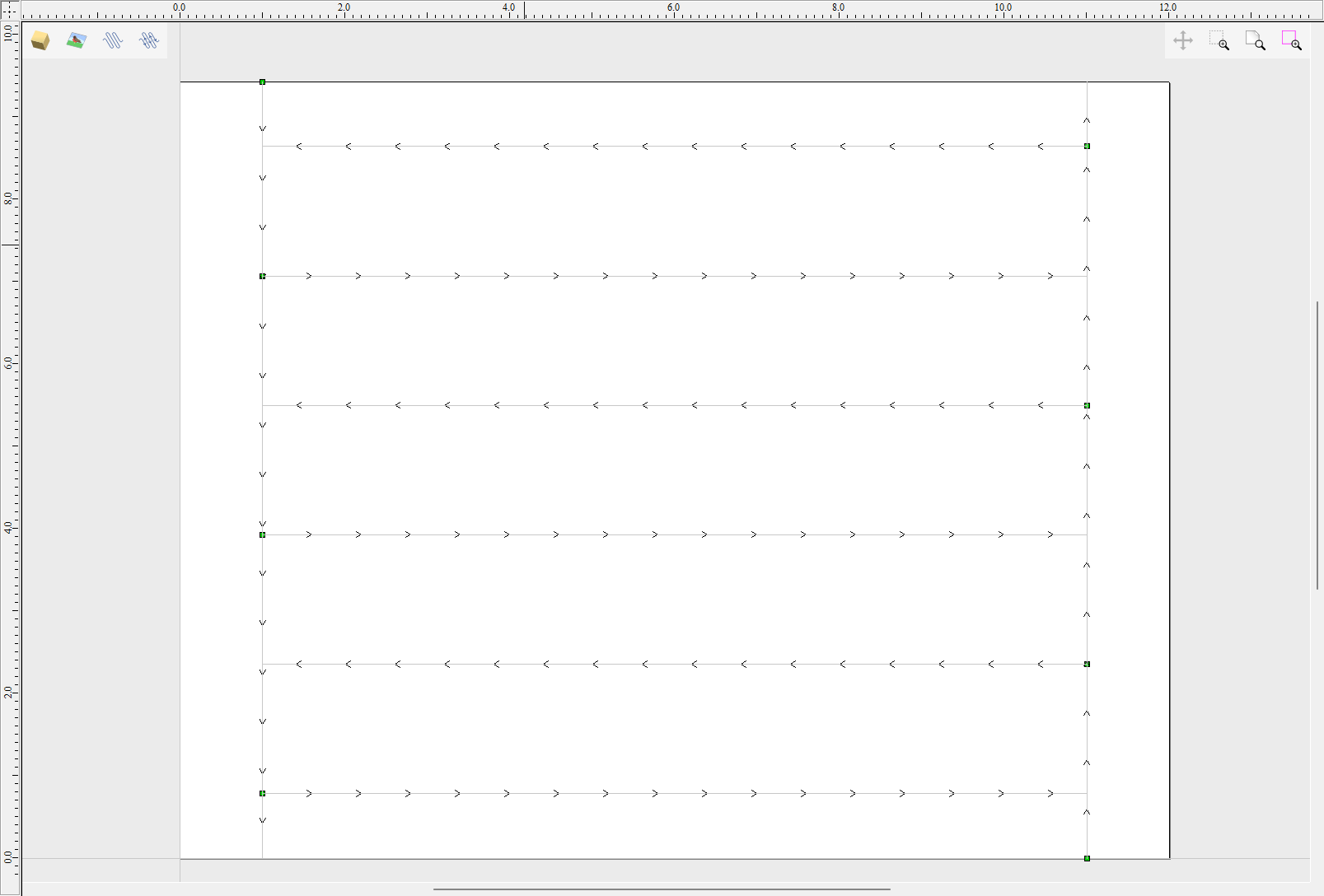
まず、 線/ポリラインを描くツールを使用してコーブ ベクトルを作成します。これらは、デザインの両端でラップされた軸に沿って実行されます。 スナップ は、作成された線が折り返された境界で開始および終了することを確認するのに役立つ場合があります。
この例では、入り江は作業境界から 1 インチの位置に配置され、縦溝流路のために中央に 10 インチが残されています。フルートは回転軸に沿って走ります。入り江と縦溝流路の始まりとの間に 0.5 インチの隙間があると仮定すると、縦溝流路の長さは 9 インチになります。この例では 8 本のフルートを使用します。
まず、回転軸に平行な長さ 9 インチの線を作成します。次に、作成したフルート ベクトルを選択し、 シフトを押しながら入り江ベクトルの 1 つを選択します。次に、 ベクトル沿いにコピーツールを使用して 9 のコピーを作成します。元のフルート ベクトルは不要になったので削除できます。最初と最後のコピーはどちらもラップされた境界上に作成されることに注意してください。つまり、それらは一致するので、そのうちの 1 つを削除できるということです。最後のステップとして、すべてのフルート ベクトルを選択し、 F9 を押してデザインの中心に配置します。
回転ツールパスの作成
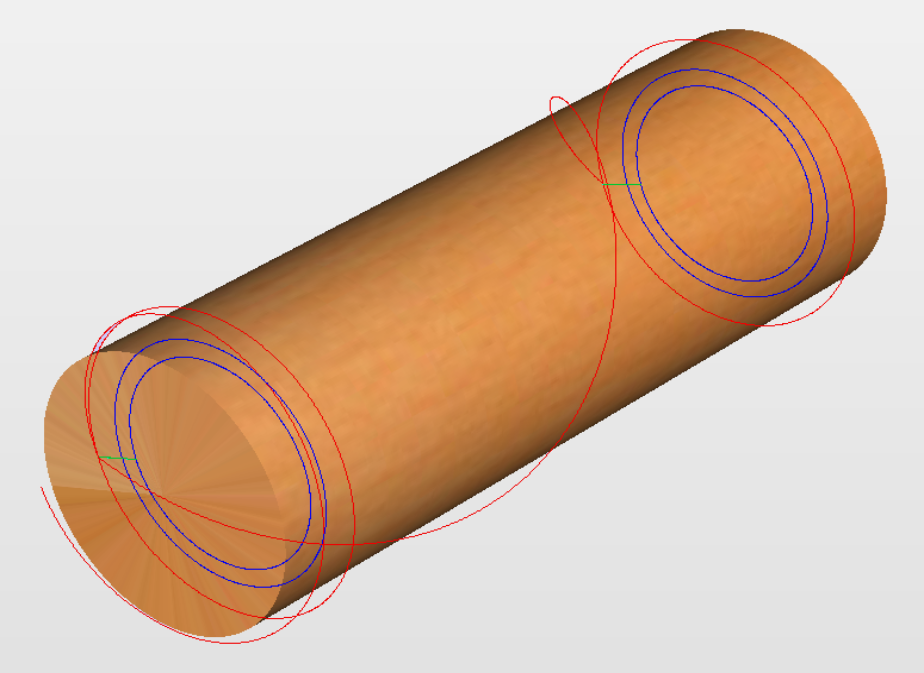
2D 回転ツールパスを作成するプロセスは、シングル モデルおよびダブル モデルのツールパスを作成するプロセスと非常に似ています。この例では、入り江ベクトルでプロファイル ツールパスを使用します。ツールパスを作成するには、入り江ベクトルを選択し、から プロファイル ツールパスをクリックします。
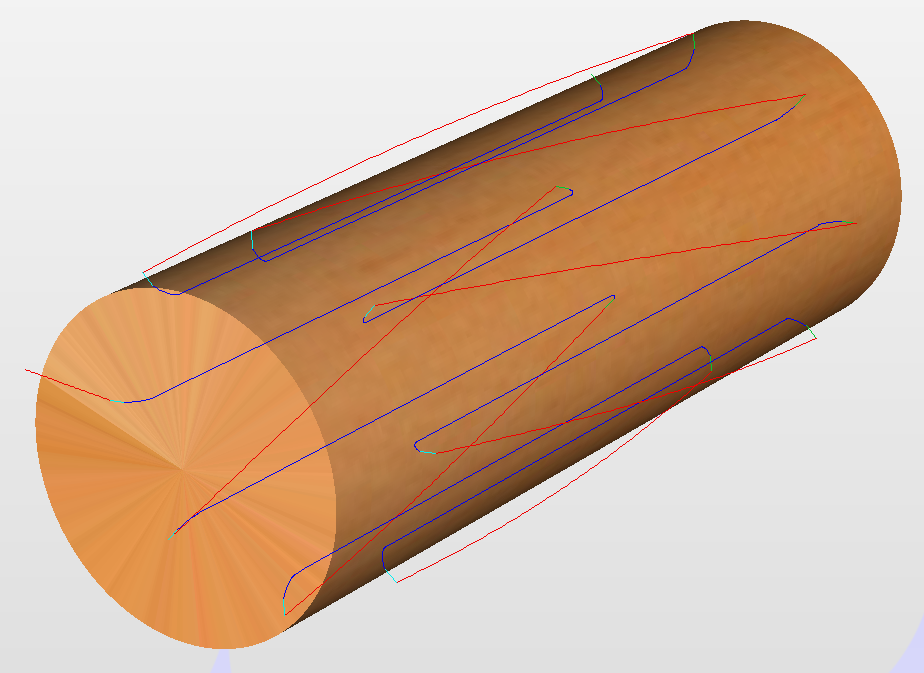
フルートのツールパスを作成するには、フルート ベクトルを選択し、 溝工具経路をクリックします。この例では、フルート深さ 0.2 に設定された 1 インチ 90 度 V ビットを使用し、開始および終了時のランプおよびランプ タイプ スムーズ オプションを使用しました。ランプの長さは 0.25 インチに設定されました。両方のツールパスを以下に示します。
ツールパスのシミュレーションと保存
工具経路をプレビューを使用してツールパスをシミュレートします。プレビューをアニメーション化するオプションが選択されている場合、シミュレーションはフラット モードで視覚化されます。シミュレーションが完了すると、ラップされた回転ビューが自動的にオンに戻ります。
片面および両面シミュレーションとは対照的に、回転シミュレーションは 100% 正確ではありません。たとえば、丸い穴は回転ビューでは楕円形として表示されますが、パーツが実際に加工されると明らかに円形になります。
デザインは完成したと考えられますが、実際には、残ったストックを切り出すことができると便利です。これは、デザインを少し長くし、プロファイルカットを追加することで実現できます。この例では、 ジョブセットアップを使用してブランクの長さを 2 インチ延長しました。 F9を使用して既存のベクトルを中心に戻すことができます。その後、既存のツールパスを再計算する必要があります。
切り出しベクトルはコーブベクトルと同じ方法で作成できます。適切なエンドミルを使用して、2 つの追加のプロファイル ツールパスを作成できます。この例では、直径 0.5 インチのタブを使用しました。これを実現するには、 切込み深さ ボックスに「z-0.25」と入力し、= を押すと、ソフトウェアが計算結果を置き換えます。式で使用される変数「z」は、ソフトウェアによって自動的に空白の半径に置き換えられます。必要に応じて マシンベクトルの外側/右側 または マシンベクトルの内側/左 を指定することも重要です。カットアウト ツールパスとその結果のシミュレーションを以下に示します。
最後のステップは、マシンが受け入れられる形式でツールパスを保存することです。 工具経路保存 を使用して、お使いのマシンに一致するラップされたポストプロセッサを選択します。
注記
この例で示されているツールと値は、説明のみを目的としています。安全で正確な加工を確保するには、工具のサイズ、送り速度、タブの直径などを使用する材料や機械に適合させる必要があります。
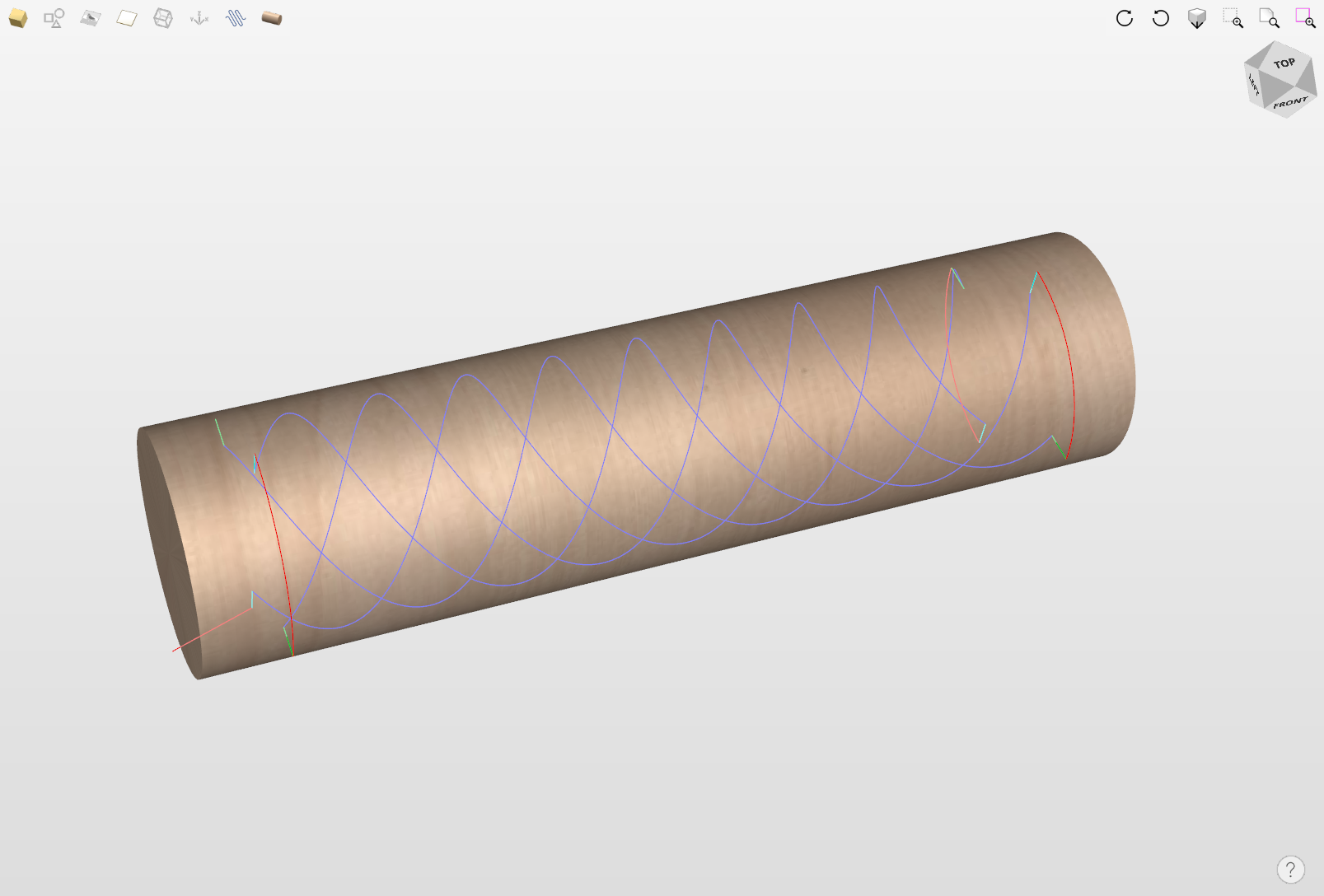
スパイラルツールパス
このセクションでは、スパイラル ツールパスを作成およびシミュレートする方法について説明します。
スパイラル ツールパスについて考える 1 つの方法は、細長い布のストリップを想像することです。このようなストリップは、特定の角度でロールに巻き付けることができます。ブランクの周囲を複数回囲むツールパスを作成するには、特定の角度で長いベクトルを作成します。このようなベクトルは、ロールから巻き戻されたときの布地のストリップに相当します。
このようなツールパスは回転ジョブの 2D ワークスペースを超えますが、シミュレーションと機械加工の両方でのラッピング プロセスのおかげで、ツールパスは実際には材料の境界内に留まります。
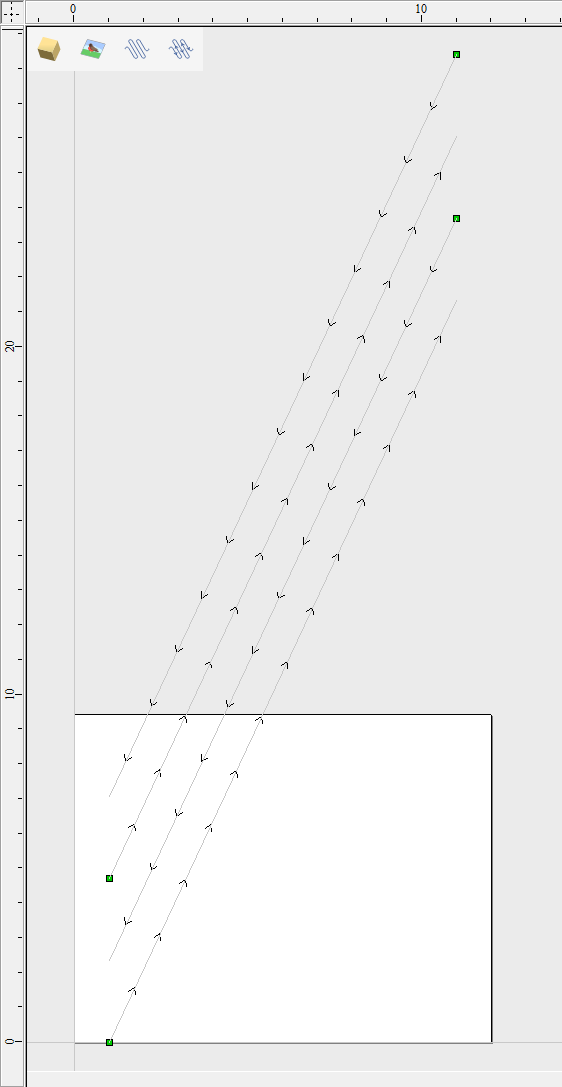
スパイラル ベクトルの設計で最も重要な部分は、指定された数のラップをもたらす線の正しい角度と長さを決定することです。回転軸に平行ではなく、螺旋溝を使用するように単純な柱の設計を変更したいとします。次の例ではフルート ラッピングを 3 回ずつ使用しますが、この方法は他の回数にも適用できます。
既存のフルート ベクトルは 1 つを除いてすべて削除できます。 線/ポリラインを描くを選択し、既存のフルートの一端をクリックして新しい線を開始します。この線は、巻き付けられた軸に沿って、ジョブの円周の 3 倍の長さで作成する必要があります。この例では、[角度] ボックスに 90 と入力し、[長さ] ボックスに y * 3 と入力して = を押すことを意味します。ラップされた軸が Y 軸ではなく X 軸である場合、上記の式は x * 3 となるはずです。
これで、元のフルート ベクトルと新しく作成されたフルート ベクトルのもう一方の端を結ぶ線を単純に描くことができます。 ベクトル沿いにコピー ツールを使用すると、この 1 つのフルートを前述の方法でコピーできます。この例では、以下に示すように 4 つの螺旋溝が作成されました。
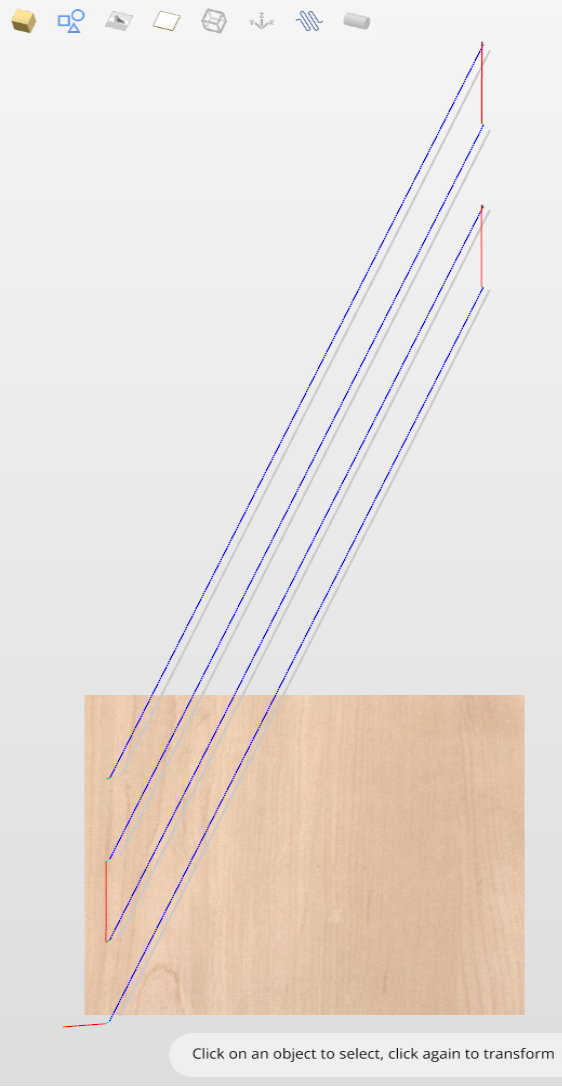
フルート ベクトルの準備ができたら、 溝工具経路を使用してツールパスを再度作成できます。注意すべき重要な点は、ラップ ビューとフラット ビューでのスパイラル ツールパスの外観の違いです。 オートラッピングをクリックすると、ラップ回転ビューからフラット ビューに切り替え、またその逆に戻すことができます。
上で見られるように、平面ビューではツールパスはベクトルに従い、ジョブの境界を越えて広がります。一方、以下に示すラップされたビューでは、ブランクの周りをらせん状にツールパスが表示されます。
これは、回転加工の一般的な 2D ワークフローの簡単な概要にすぎません。回転加工専用のビデオ チュートリアルも忘れずにご覧ください。アプリケーションの初回起動時にチュートリアル ビデオ ブラウザのリンクからアクセスできます。
ロータリー加工とラッピング
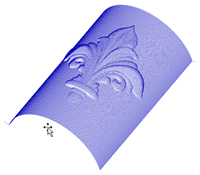
VCarve Pro は、シリンダーの周りに平坦なツールパスを「巻き付け」て、回転軸 / インデクサーで構成された CNC 機械に出力を提供できます。下の画像は、円柱の一部に巻き付けられた平らなツールパスを示しています。
注記
ラッピングは、XYZ の「フラット」ツールパスを取得して回転軸の周りにラップし、X または Y の移動を角度移動に置き換える、特別に構成されたポストプロセッサと連携して機能することに注意することが重要です。
オートラッピング モードがオンの場合、ツールパスはプログラム内でラップされて視覚化できます。
VCarve Pro は、ラップされたシェーディング複合モデルを描画することで、プログラム内でラップされたモデルを視覚化することもできます。

VCarve Pro には、ラップされたツールパス シミュレーションを描画する機能もあります。これは完成品がどのように見えるかを把握するのに非常に役立ちますが、ラッピングされたシミュレーションは完成品がどのように見えるかを 100% 正確に表現できるわけではないことを認識することが重要です。潜在的な違いの例としては、回転作業でドリルで穴を開けた場合などが挙げられます。実際のワークピースでは、これらは明らかに単なる丸い穴ですが、ラップされたシミュレーションでは、表示のために平らなシミュレーション モデルをラップするときに発生する「ストレッチ」プロセスにより、これらは歪んだ楕円として表示される場合があります。
注記
回転軸が Y 軸に沿って配置されている場合は、ジョブのセットアップ中に [Y 軸に沿った方向] オプションを選択します。このドキュメントのすべての例では、回転軸が X に沿って位置合わせされていることを前提としています。
マシンコントローラーと回転軸/インデクサーの軸方向の可能な組み合わせは膨大な数あることを認識することが重要です。これは、Vectric が、考えられるすべての組み合わせに対して事前構成されたポストプロセッサーを標準として提供することは非現実的であることを意味します。ソフトウェアには、 マシン構成をセットアップするときに構成できるいくつかのラッピング ポストプロセッサーが含まれています。
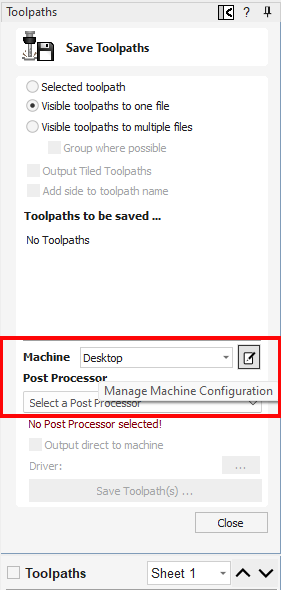
新しい投稿を選択する必要がある場合は、 工具経路保存 メニューにアクセスして選択できます。これを行うには、以下の画像に示すように、[マシン構成の管理] ボタンをクリックします:
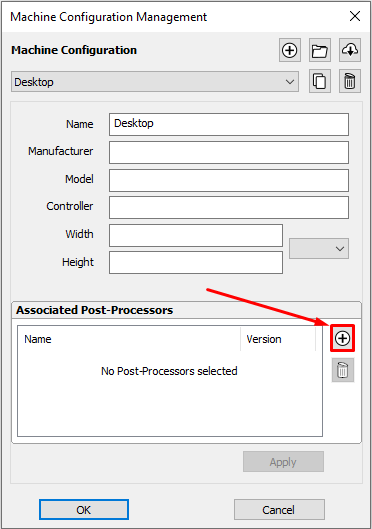
これによりメニューが開き、「関連付けられたポストプロセッサ」の下にある ボタンを押して、ソフトウェア内で使用可能なすべてのポストプロセッサにアクセスし、マシン構成に適切なラップされたポストプロセッサを選択できるようになります。
後で編集する必要がある場合は、このメニューで投稿を右クリックし、[表示] を選択して投稿の内容を表示することもできます。
これらの投稿を調べると、独自の投稿を構成する必要がある場合に役立つ場合があります。 Vectric がマシン構成用の標準ポストを提供していない場合は、プログラムのヘルプ メニューからアクセスできるポストプロセッサ編集ガイドを参照してポストプロセッサの構成方法を確認し、Vectric が提供する標準ロータリー ポストも参照してください。
また、 ベクトリックフォーラム を見て、他の誰かがあなたの設定または同様の投稿をすでに設定していないかどうかを確認する必要があります。これらのリソースを参照した後でも、自分のマシンに何をする必要があるかまだわからない場合は、お気軽に support@vectric.com までお問い合わせください。ただし、個々の要件に合わせてカスタムのロータリー ポストプロセッサを作成することは保証できないことに注意してください。
Rotary プロジェクトへの外部モデルのインポート
フル 3D モデルのインポート
このセクションでは、テーブルの脚を例として、フル 3D STL モデルをロータリー プロジェクトにインポートするプロセスを説明します。
概要
外部モデルをロータリー ジョブにインポートする場合は、2 つの基本的な使用例があります。最初のケースでは、この特定のジョブ用に設計されたモデルを別のソフトウェアに取り込むことが含まれます。したがって、インポートされた作品の寸法はすでに正しい場合があり、それをプロジェクトのサイズに使用することが望ましい場合があります。 2 番目の使用例は、特定のマシンに合わせてスケールする必要があるストック モデルをインポートする場合です。
Aspire は、これらの両方のケースをカバーする次のワークフローを使用します。
- ロータリープロジェクトのセットアップ
- インポートするファイルの選択
- マテリアルブロック内のモデルの方向を設定する
- モデルのスケーリング
- インポートを終了する
ロータリープロジェクトのセットアップ
ジョブ設定フォームを使用して新しいジョブを作成します。次のステップで適切なインポート ツールが使用されるように、ジョブ タイプをロータリーとして設定することが重要です。
プロジェクトの寸法がすでにわかっている場合は、それらを直接指定できます。
モデルを特定のマシンまたは利用可能なストックに適合させたい場合は、直径と長さの両方を 最大に設定します。インポート中に、モデルはこれらの制限に合わせてスケーリングされます。
インポートしたモデルのサイズを使用したい場合は、この時点で どれでも サイズを指定できます。モデルのインポート中に、モデルの寸法に合わせてプロジェクトのサイズを自動的に変更できます。
この例では、直径 4 インチ、長さ 12 インチの特定のストック サイズにモデルを適合させることが必要でした。 XY原点を中心に設定しました。
ファイルのインポートと向きの調整
インポート プロセスを開始するには、[モデリング] タブの コンポーネントまたは 3D モデルをインポートするツールを使用します。
[インポートされたモデル タイプ] が [フル 3D モデル] に設定されていることを確認します。
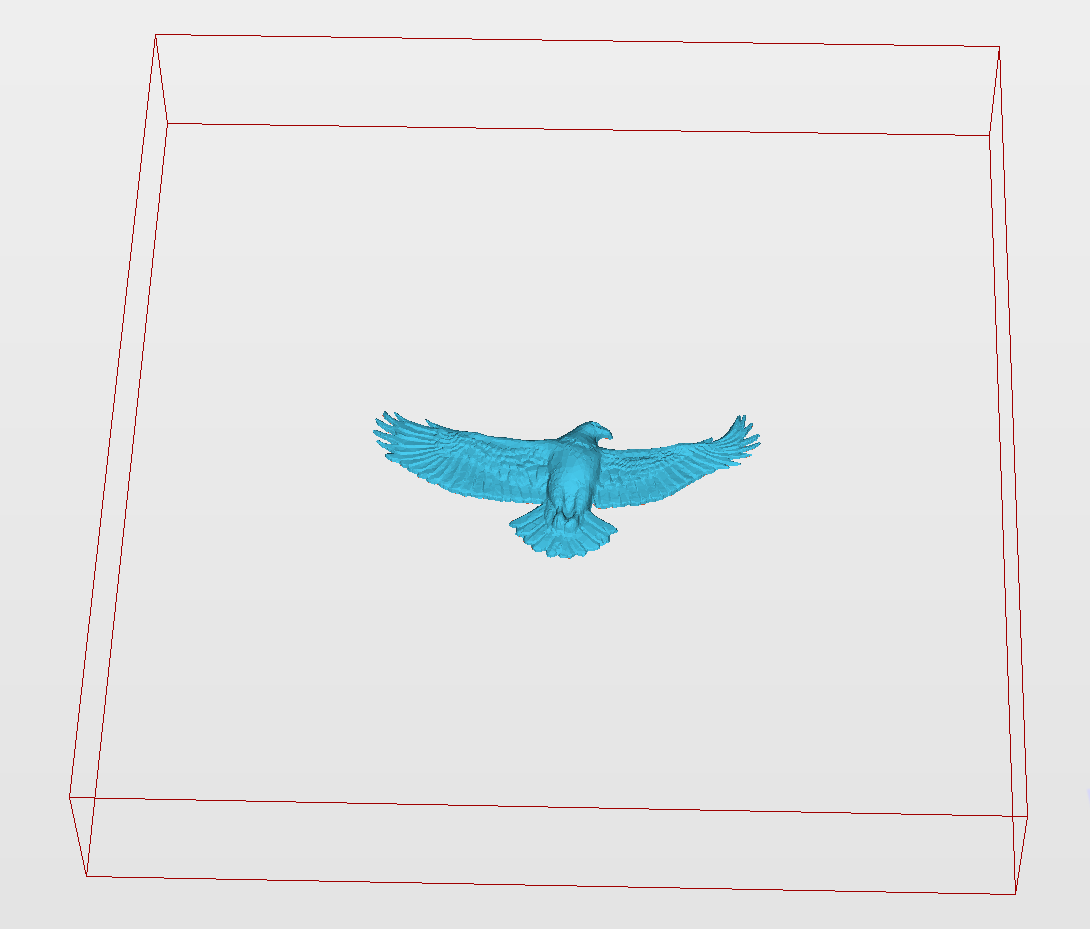
最初のステップは、インポートしたモデルをマテリアル内に配置することです。この情報はインポートされたファイルには存在しないため、この手順が必要です。モデルが開かれると、インポート ツールは以下に示すように初期方向を選択します。
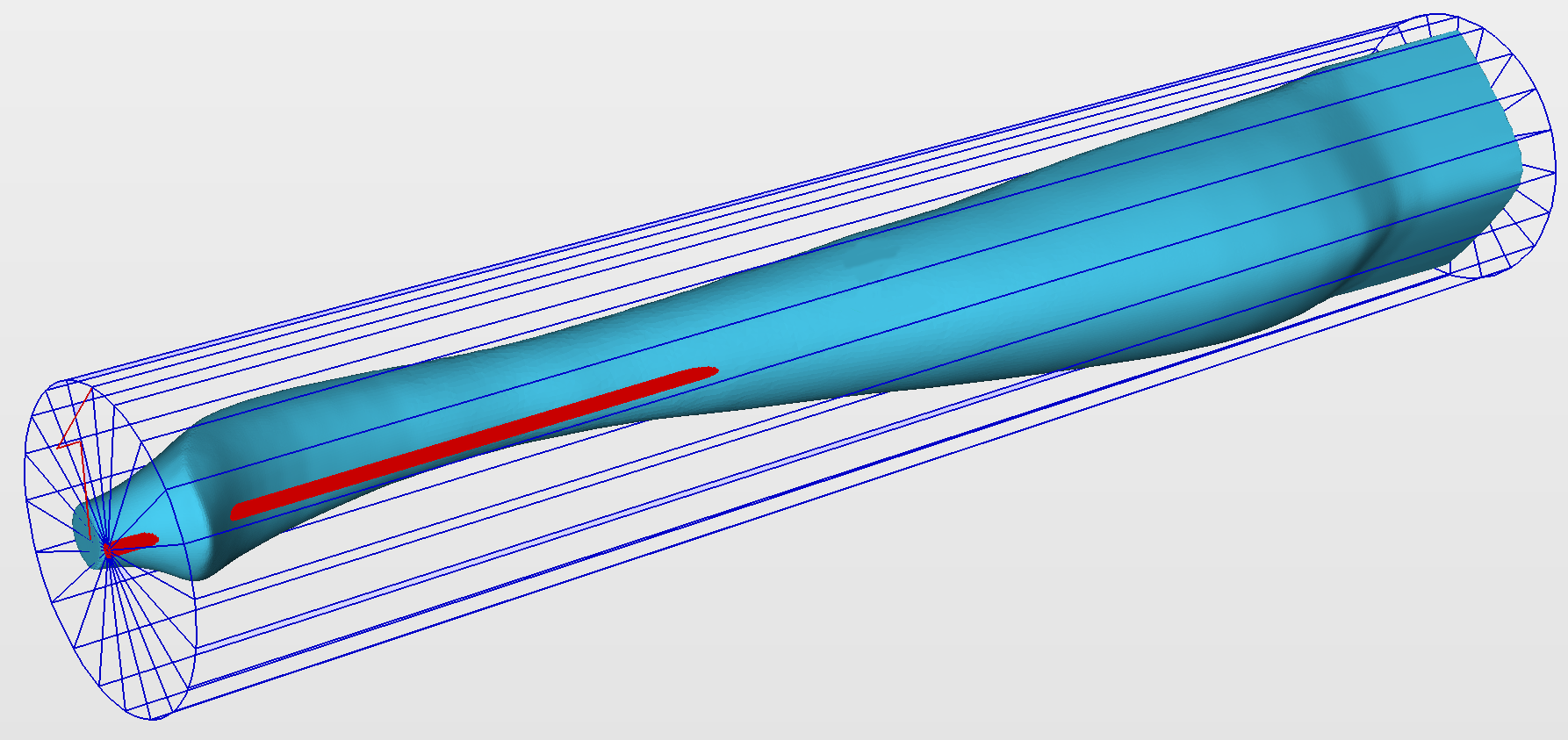
モデルの方向を決定しやすくするために、ソフトウェアでは青い境界円柱が表示されます。この円柱の回転軸は材料ブロックに定義された回転軸と一致しているため、基準として使用できます。そのサイズは、インポートされたモデルを現在の向きで含めるのに十分な大きさです。モデルの方向が変更されると、この青い円柱は縮小または拡大するため、常にモデルが含まれます。この段階では、モデルを正しく配置することだけに関心があるため、正確な寸法は重要ではありません。
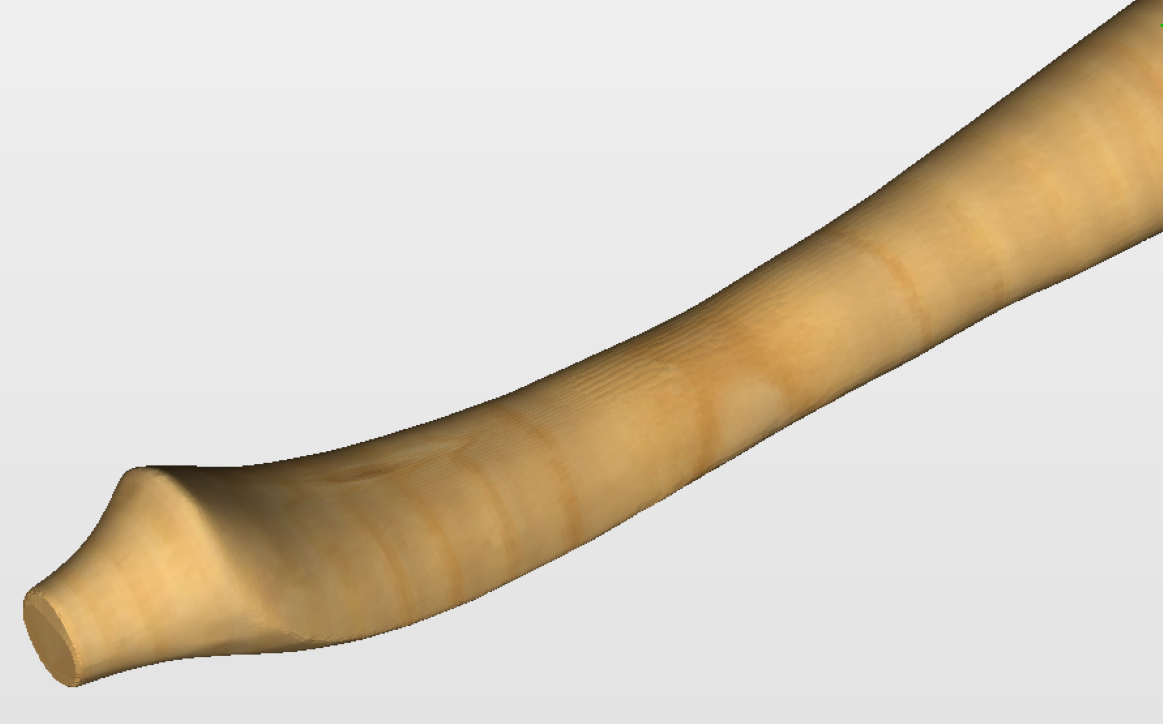
また、ソフトウェアは回転軸を赤色で強調表示します。これは、曲げモデルをインポートする場合に特に重要です。現在、回転軸の完全に下または上にあるモデルの領域を表現することはできません。ここに示す例がこれに当てはまります。モデルをそのままインポートすると、以下のような歪みが生じてしまいます。したがって、回転軸がモデル内に含まれるようにモデルを配置することが重要です。
ソフトウェアによって表示される最後のガイド要素は、シリンダーの側面にある赤い半矢印です。この矢印は、2D ビューでラップされた寸法の中心に対応する位置を示しています。この例では、脚の前部が 2D ビューの中心ではなく側面に配置されるようにモデルの向きが設定されています。したがって、この矢印がインポートされたモデルの前面を指すようにモデルを回転することをお勧めします。
インポート ツールには、モデルの方向を調整するいくつかの方法が用意されています。最も基本的なものは初期方向です。これを使用して、モデルを回転軸に大まかに位置合わせできます。これは、Z 軸を中心とした回転と組み合わせることもできます。この例では、ツールは回転なしで左を選択しました。脚の前部を赤い矢印に合わせるには、Front と -90 を Z 軸を中心とした回転として使用できます。
最初の方向が決定したら、インタラクティブ回転を使用してさらに調整を行うことができます。デフォルトのオプション - XYZ ビュー - は対話型回転を無効にします。つまり、マウスを使用して 3D ビューを いじった できるということです。他のオプションを選択すると、指定した軸を中心とした回転が有効になります。
この例では、脚の前部を赤い矢印に揃えるために初期方向を変更する代わりに、X モデル オプションを選択してピースを手動で回転できます。単一軸の回転を選択すると、その軸が画面の方向を向いているように 3D ビューが調整されます。間違いがあった場合は、 Ctrl + Zを使用して回転を元に戻すことができます。
パーツが回転されるたびに、パーツは常に円柱の中心に配置されることに注意してください。この例では、回転軸をモデル内に含める必要があるため、これは望ましくありません。回転軸に対してモデルを移動するには、 回転軸の移動を使用できます。
前述のツールと同様に、回転軸の移動がオフに設定されている場合、3D ビューをパンすることができます
インポートするモデルを正しく配置するには、曲がるモデルで望ましい結果を得るために、回転軸の移動とインタラクティブな回転の組み合わせが必要になる場合があります。歪みを避けるために、回転軸が非表示になっていることを確認することが重要です。ただし、機械加工中に工具の角度が最適に近い角度になるように、回転軸を部品の各セグメントの中心に置くことも望ましいです。通常、調整後にビュー内のモデルを軸を中心に回転すると便利です。これにより、表示角度を変更する前にインタラクティブ回転を無効にする必要がなく、モデルを両側から検査できるようになります。
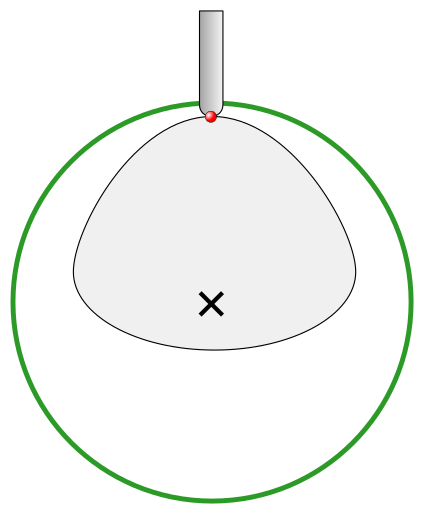
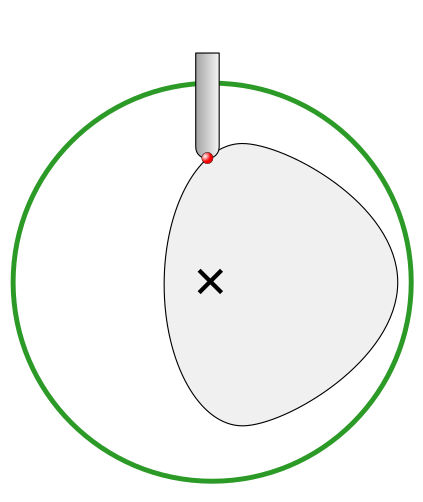
Aspire が行うことを理解することが重要です。 ない 4軸加工をサポート。つまり、加工された部品を回転させ、工具を回転軸に沿って Z 方向に移動させることはできますが、ラップされた寸法内で工具を移動させることはできないため、工具は常に回転軸の上にあり、回転軸に移動することはできません。サイド。
この制限を以下に示します。最初の写真は、ポイントの正しい加工を示しています。ただし、工具が別の場所に移動すると、角度が正しくなくなり、さらに悪いことに、工具側がストックに接触してしまいます。
インポートされたモデルのスケーリング
モデルを希望どおりに配置したら、そのサイズを考慮に入れることができます。
デフォルトでは、ツールはインポートされたモデルがプロジェクトと同じ単位を使用していると想定します。そうでない場合は、モデル単位を切り替えることができます。この例では、プロジェクトはインチで設定され、インポートされたモデルは mm で設計されました。切り替え後、モデルは大幅に小さくなり、以下に示すように、現在のマテリアル ブロックを表す赤い円柱が表示されます。
この時点で、直径と長さの観点からモデルのサイズを指定することができます。これは、希望の寸法を入力するか、材料に合わせることで手動で行うことができます。 [ロック比率] オプションが選択されている場合、直径と長さの比率が維持されます。マテリアルブロックのサイズ変更オプションにチェックを入れることもできます。これが選択されている場合、マテリアル ブロックはモデルの現在のサイズに合わせて拡大縮小され、 後 OK をクリックします。
モデル サイズをマテリアル ブロック サイズとして使用したい場合は、単位が正しいことを確認してから、マテリアル ブロックのサイズ変更オプションにチェックを入れて OK を押します。
モデルをマテリアルに合わせたい場合は、「マテリアルに合わせてモデルをスケール」をクリックし、「マテリアル ブロックのサイズを変更」にチェックを入れます。
この例では、モデルがマテリアルに適合されました。この場合、ピースの長さが制限要因となり、ロック率が維持されるため、モデルの直径は素材ブロックよりも大幅に小さくなります。したがって、マテリアルブロックのサイズを変更するオプションにチェックが入っていました。
インポートを終了しています
[OK]を押すと、モデルがコンポーネントとしてインポートされます。必要に応じて、他のコンポーネントとして変更したり、表面に装飾的なクリップアートを追加したりすることが可能です。
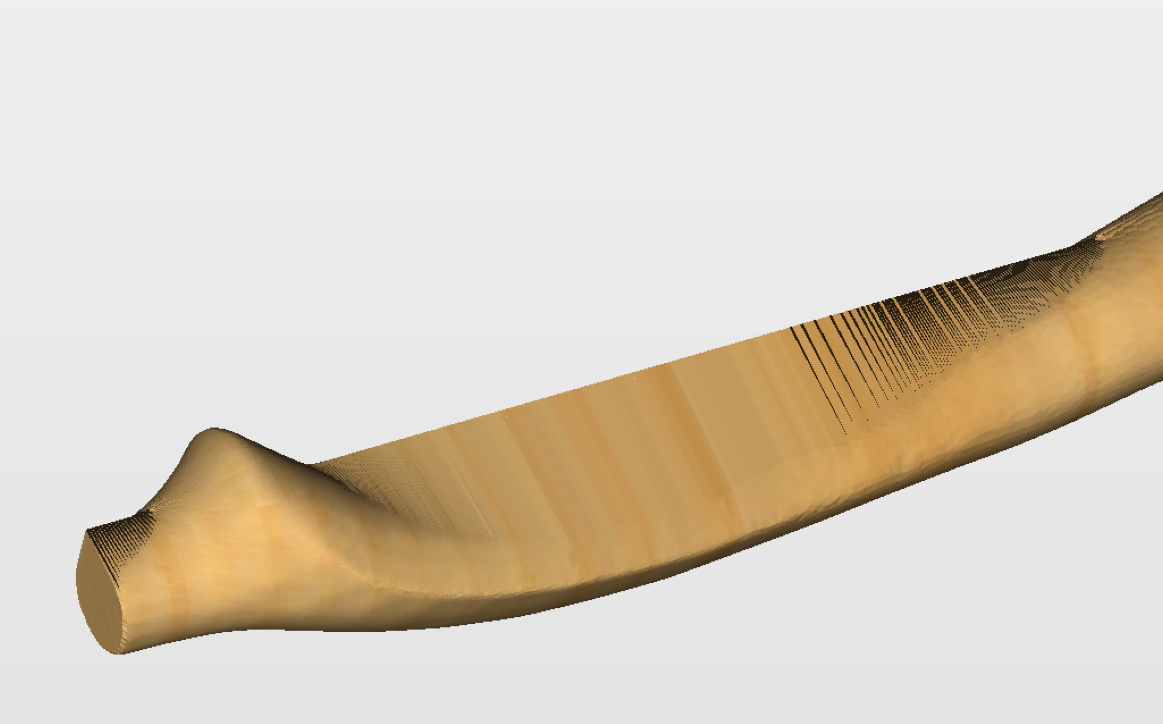
ラッピングプロセスによって生じる歪みに留意することが重要です。つまり、ラップされたツールパスはブランクの表面でのみ平らなツールパスと一致します。ツールパスが回転軸に近づくほど (つまり深くなるほど)、ツールパスはさらに「圧縮」されます。この事実は 3D ツールパスに重大な意味を持ちます。以下に示す例を考えてみましょう。
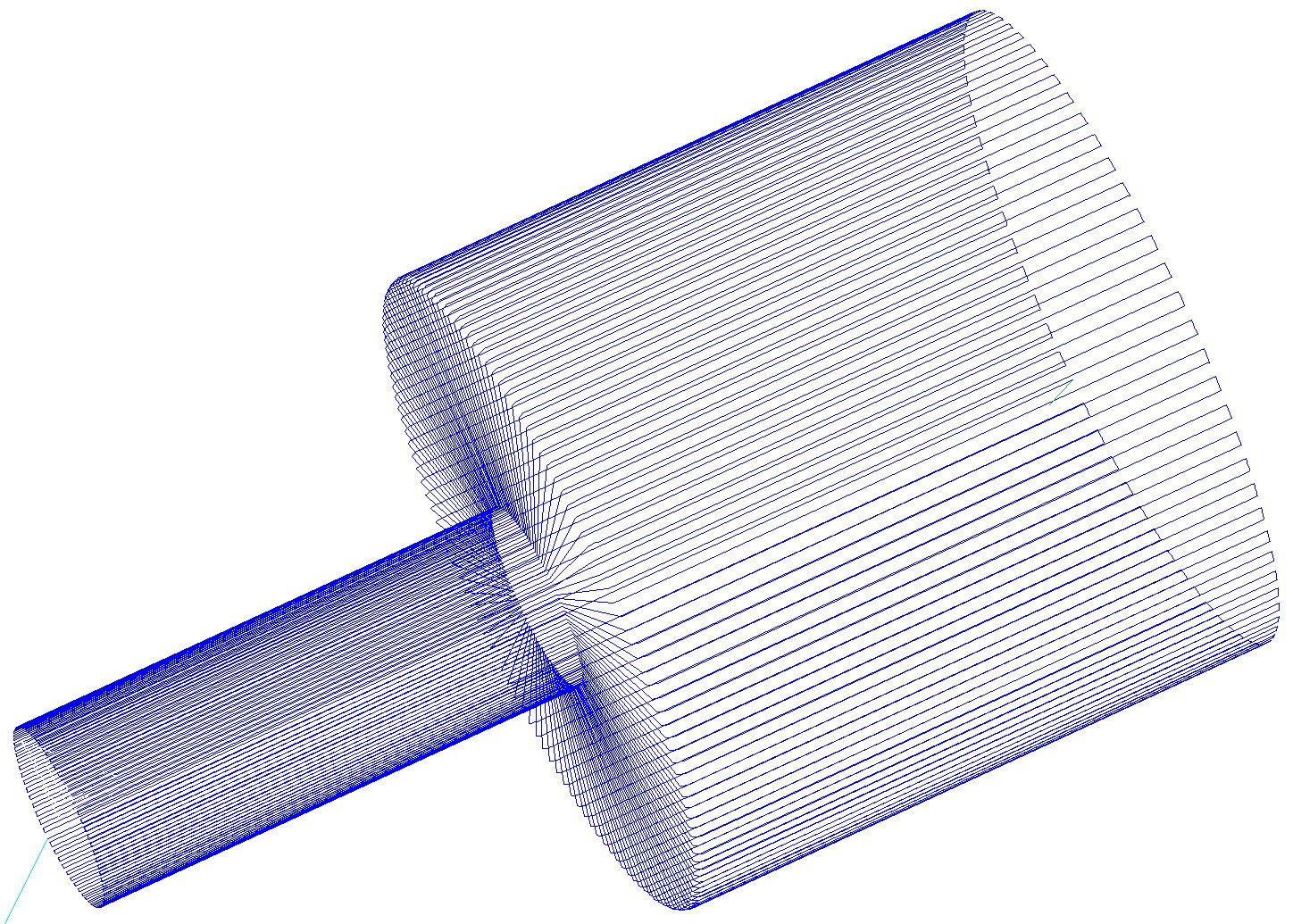
モデルのさまざまな部分で直径に大きな違いがある場合にわかるように、モデル全体に対して 1 つの 3D ツールパスを生成すると、ラップされたツールパスが過度に圧縮されます。したがって、通常は、直径が大きく異なる領域の境界を作成し、直径ごとに正しい設定を使用して個別のツールパスを生成する方が良いでしょう。
フラットモデルのインポート
このセクションでは、フラット STL モデルをロータリー プロジェクトにインポートするプロセスを説明します。フラット モデルは、Aspire で提供される装飾的なクリップアートに似ており、モデル化された形状の表面に配置されることを想定しています。
インポート プロセスを開始するには、[モデリング] タブの コンポーネントまたは 3D モデルをインポートするツールを使用します。
インポートされたモデルのタイプがフラット モデルに設定されていることを確認してください
繰り返しますが、最初のステップは、モデルの適切な方向を選択することです。ツールは初期方向を選択し、赤いマテリアル ボックスにモデルを表示します。このボックスは「包まれていない」材料ブロックに対応し、その厚さはブランクの指定された直径の半分に等しくなります。
モデルの向きが正しくない場合、つまり、上に見られるように、マテリアル ボックスの底に平らに置かれていない場合は、向きを調整する必要があります。これを行うには、[初期方向] オプションや Z 軸を中心とした回転を変更できます。
インポートされたモデルがどの軸とも位置合わせされていない場合は、インタラクティブな回転を使用する必要がある場合があります。デフォルトのオプションである XYZ ビューでは、インタラクティブな回転が無効になります。つまり、マウスを使用して 3D ビューを いじった できるということです。他のオプションを選択すると、指定した軸を中心とした回転が可能になります。
Ctrl + Zを押すと、各回転を元に戻すことができます。
モデルの向きが適切になると、単位変換を実行できるようになります。デフォルトでは、ツールはインポートされたモデルがプロジェクトと同じ単位を使用していると想定します。そうでない場合は、モデル単位を切り替えることができます。
モデルのスケーリング オプションも含まれています。 [比率をロック] オプションを選択すると、X、Y、Z の長さの比率が維持されます。モデルがインポートされると、コンポーネントとしてプロジェクトに追加されることに注意してください。したがって、モデルをインポートした後、正しい配置、回転、サイズ変更を実行できます。
プロジェクトにまだモデルが含まれていない場合は、次のメッセージが表示されます。

通常は、単に「はい」をクリックするだけで済みます。モデリング平面の調整に関する詳細な説明は、 3D 回転プロジェクトのモデリングに記載されています。
高度 - インポートされた 3D ツールパス ファイル
3D ツールパスを含む Vectric の Cut3D、PhotoVCarve、Design and Make Machinenist のファイルは、メイン メニュー コマンド: ファイル ► インポート ► PhotoVCarve、Machinist または Cut3D ツールパスを使用して VCarve Pro にインポートできます。
ツールパスが計算される前に、まず 3D ファイルを必要なサイズに拡大縮小してから、 VCarve Proにインポートできるように完全なファイルを保存する必要があります。これらのファイルは VCarve Pro 内にのみ移動および配置できますが、拡大縮小することはできません。
3D ジョブのグレースケール サムネイルは、Cut3D、PhotoVCarve、または Design and Make Machinenist で設定された位置を X0 Y0 原点として 2D ビューに描画されます。関連するツールパスも 3D ウィンドウに描画され、名前がツールパス リストに表示されます。
位置決め
3D デザイン ツールパスを移動するには、2D ウィンドウを開き、グレースケール イメージ上で左マウスを 2 回クリックし (水色に変わり、選択されていることを示します)、必要な位置までドラッグするか、移動ツールまたは位置合わせツールを使用して正確な位置を決めます。
ツールパスは 3D ウィンドウ内で画像と同じ XY 位置に自動的に移動します。

上の例のツールパスは、3D デザインの中央にある X0 Y0 を使用して計算されています。 VCarve Pro にインポートされると、データは同じ座標を使用して自動的に配置され、デザインの 4 分の 3 がジョブから外されます。 2 番目の画像では、グレースケール画像がジョブの中央に移動されています。
2D ミラーおよび回転描画ツールを使用して 3D データ セットを編集することもできます。
3D ツールパスは、[ツールパス] タブの 工具経路を複製 コマンドを使用してコピーすることもできるため、ジョブで 1 つの設計から複数の要素を非常に簡単に使用できます。サムネイル プレビューもツールパスごとにコピーされるため、3D ツールパスの追加コピーを非常に簡単に配置できます。
たとえば、単一のデザインをコピーしてミラーリングして、3D デザインの左右のバージョンを作成したり、以下に示すようにキャビネットのドア パネルの隅に装飾デザインの複数のコピーを配置したりすることができます。
3D 要素のツールパスは、従来のプロファイル、ポケット加工、穴あけのツールパスとともにプレビューでき、加工の準備が整った状態ですべて保存されます。
この機能を PhotoVCarve と組み合わせて使用する良い例は、PhotoVCarve の溝に加え、説明的な彫刻テキストと装飾的なプロファイルまたはベベルの境界線を含むパーソナライズされたピクチャ フレームを作成する場合です。以下に示すように:
オプション
インポートしたツールパスを編集して材料内に配置したり、速度や送り速度などの切削パラメータを変更したりすることもできます。
設計と製造の機械工
複数のツールパスを含む Design and Make Machinenist ファイルを使用する場合は、インポートされたすべての 3D ツールパスの開始深さを忘れずに編集する必要があります。
「ツールパスの編集」アイコンをクリックするか、ツールパス名をダブルクリックして編集フォームを開きます。
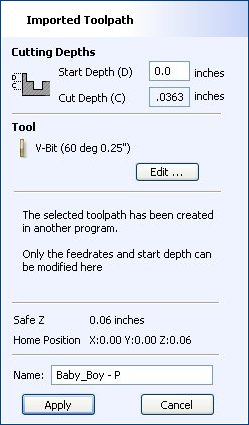
たとえば、深さ 0.5 インチのポケットを加工した後、PhotoVCarve デザインを編集して開始深さ = 0.5 インチにすることができ、これによりポケット表面のベースに写真が彫刻されます。
ポストプロセッサ編集
ポストプロセッサの用途
ポストプロセッサとは、特定のルーターまたは工作機械に対して適切な形式に、工具移動のXYZ座標を変換するプログラムのセクションです。
構成ファイルは、特定のマシンコントロールに適応するように、プログラムからの出力をカスタマイズします。このドキュメントは、構成ファイルの作成および編集方法の詳細を説明します。
以下は、G-CodeとHPGLにポストプロセスされた一般的なプログラムのセクションを示します。
G-Code出力
T1 M6
G17
G0 Z4.5000
G0 X0.0000 Y0.0000 S12000 M3
G0 X2.4567 Y7.8342 Z0.2500
G1 Z-0.0500 F5.0
G3 X3.3784 Y8.7559 I0.0000 J0.9218 F66.0
G3 X2.4567 Y9.6777 I-0.9218 J0.0000
G3 X1.5349 Y8.7559 I0.0000 J-0.9218
HPGL出力
IN;PA;
PU2496,7960;
PD2496,7960;
AA2496,8896,90.000
AA2496,8896,90.000
AA2496,8896,90.000
AA2496,8896,90.000
PU2496,7960;
PU2496,6096;
マシンコントローラーの製造元は、特定のマシンで実行するためのプログラムに必要な形式に、ファイルをカスタマイズする場合があります。これにより、当該マシンの特性に適応するように、コントロールを最適化することができます。
Vectricのポストプロセッサは、簡素なテキストベースの構成ファイルを使用します。そのため、必要に応じて、ユーザーによる構成ファイルのカスタマイズが可能です。
ポストプロセッサの各セクション
Vectricのポストプロセッサは、明瞭性の観点から複数のセクションに分類されているので、類似したスタイルで独自のポストプロセッサを書き出して、デバッグに利用することができます。
ファイルコメント
ポストプロセッサについて説明し、ポストプロセッサへの変更を記録できるセクション。各行はコメントであり、「+」文字または「|」で始まります。キャラクター。
+ History
+ Who When What
+ ======== ========== ===========================
+ Tony 14/07/2006 Written
+ Mark 26/08/2008 Combined ATC commands, stop spindle on TC
+================================================
グローバルファイルステートメント
ステートメントとは、一度だけ使用されるアイテム、または、ファイルを通じて複数の静的な値を持つアイテムです。明瞭性を保つために、ステートメント名には大文字のみを使用します。
ステートメント | 結果 |
| ポストプロセッサのリストに表示される名前です。 |
| ファイルに与えられるファイル拡張子です。 |
| ファイルが出力する単位(インチ/MM)です。 |
| 工作機械の製造元は、NCファイル出力の直接受け入れが可能なドライバー(通常はプリンタードライバー)を提供します(例: Generic HPCL_Arcs.pp参照) |
| (素材設定フォームで指定される)Plunge (Z2) 高さへの切り込み動作が、早送り移動であることを示します。 |
| コントロールソフトウェアが、NCファイル出力の直接受け入れが可能なドキュメントインターフェイスを使用します。 |
| Y軸の移動が、指定された直径の円筒周りにラップされます。「Y」値は「A」として出力されます。 |
| X軸の移動が、指定された直径の円筒周りにラップされます。「X」値は「B」として出力されます。 |
| 当該マシンの回転速度は、スピンドルの実際の速度(RPM)を表す1から15までの整数の範囲として出力されます(この例では、4500から15000 RPM)。 |
| このコマンドを使用して、( 文字は「オリジナル - 代用」のようにペアで入力されます。 例えば、MACH 3コントロールソフトウェアは、コンマ区切りとして丸括弧を使用し、ネスト化されたコメントの利用は許容しません。 |
| Rotary: 逆時間送りモードにおける送り速度Fの出力の有効/無効を切り替えます。 GCodeでは、これによりG93がオンになるかG94がオフになり、単位モードを使用します。 |
| このポストプロセッサがレーザー ツールパスをサポートしていることを示します ( レーザーモジュール がインストールされている場合)。 |
| 任意の最小円弧半径です。この値より小さな半径を持つ円弧は、単一の直線移動に変更されます。 |
| 任意の最大円弧半径です。この値より大きな半径を持つ円弧は、ポリゴン化されます。 |
POST_BASE | これは、別のポストプロセッサのコンテンツを継承する サポートされなくなりました 方法です。詳しくは POST_BASE の移行 のページをご覧ください。 |
テープ切り離しサポート
工具経路の出力が分割される長さを説明します。
TAPE_SPLITTING=MAX_NUM_LINES LINE_TOL "FILENAME_FORMAT" START_INDEX INDEX_ON_FIRST_FILE
以下のコマンドを例として使用します。
TAPE_SPLITTING=1000 100 "%s_%d.tap" 1 "YES"
この場合
出力は最大1000行(ただし、その多くの行がポストプロセッサのフッターセクション内)の複数ファイルに分割され、900行(1000 – 100)以降にリトラクト動作がある場合、ファイルは該当する移動で分割されます。ファイル名が「toolpath」の場合、分割されるファイルの名前は「toolpath_1.tap」、「toolpath_2.tap」となります。最初の工具経路出力は、「toolpath_ 1.tap」となります。 INDEX_ON_FIRST_FILE=YES が使用されているため、「toolpath」はインデックス番号なしにはなりません。ただし、ファイルが1000行未満の場合はファイルが分割されないため、この限りではありません。
注記
NCファイルの分割が必要な一部のコントローラーでは、ファイル名の文字数にも制限があります。例えば、MSDOSスタイルの8.3ファイル名形式での命名が必要になる可能性があります。出力ファイルの命名時には、この点を考慮する必要があります。
行終了文字
LINE_ENDING="[13][12]"
文字の10進数値は、ポストプロセッサファイルの各個別行にアペンドされます。WindowsまたはMSDOS形式のテキストファイルの読み込みが可能なコントローラーでは、通常は[13][10](復帰、改行)となります。
ナンバリングのブロック
出力ファイルに行番号を追加する場合、現行行番号が変数[N]で追加されます。この行番号変数の挙動は、以下の変数に制御されます。
ステートメント | 結果 |
| 行番号を開始する値です。 |
| 行番号間の増分値です。 |
| 再度 重要:一部のコントローラーでは、コントロール上に表示可能な行数に制限があります。 |
変数
変数名 | 以下で出力 | 値 | サンプルファイル |
|
| 現行送り速度です。 | Mach2_3_ATC_Arcs_inch.pp |
|
| 現行加工送り速度です。 | CNCShark-USB_Arcs_inch.pp |
|
| 現行切り込み送り速度です。 | CNCShark-USB_Arcs_inch.pp |
|
| R.P.Mの現行回転速度です。 | GCode_arc_inch.pp |
|
| JETベースの工具(レーザーなど)の現行電源設定です。 | grbl_mm.pp |
|
| 現行工具番号です。 | Mach2_3_ATC_Arcs_inch.pp |
|
| 前の工具番号です。 | NC-Easy.pp |
|
| 行番号です。 | Mach2_3_ATC_Arcs_inch.pp |
|
| 現行工具名です。 | MaxNC_インチ.pp |
|
| 現行工具のToolDBのメモフィールドからのテキストです。 | Busellato_Jet3006_arc_inch.pp |
|
| 現行工具経路名です。 | Viccam_ATC_Arcs_inch.pp |
|
| (「工具経路保存」に生成される)ファイル名です。 | ez-Router_inch.pp |
|
| 工具経路ファイルの保存先フォルダーです。 | Woodp_arc_mm.pp |
|
| 工具経路のファイル拡張子です。 | TekcelE_Arc_ATC_3D.pp |
|
| 工具経路のフォルダーパス名です。 | WinPC-NC_ATC_Arcs_mm.pp |
|
| X軸における工具位置の現行座標です。 | GCode_arc_inch.pp |
|
| Y軸における工具位置の現行座標です。 | GCode_arc_inch.pp |
|
| Z軸における工具位置の現行座標です。 | GCode_arc_inch.pp |
|
| A軸における工具位置の現行座標です。 | |
|
| X軸における円弧の中心です(最終X,Y位置に相対)。 | Mach2_3_ATC_Arcs_inch.pp |
|
| Y軸における円弧の中心です(最終X,Y位置に相対)。 | Mach2_3_ATC_Arcs_inch.pp |
|
| X軸における円弧の中心です(絶対座標)。 | Isel_arc_mm.pp |
|
| Y軸における円弧の中心です(絶対座標)。 | Isel_arc_mm.pp |
|
| X軸における円弧の開始位置です。 | TextOutput_Arcs_mm.pp |
|
| Y軸における円弧の開始位置です。 | TextOutput_Arcs_mm.pp |
|
| Xにおける円弧の中点です(絶対座標)。 | TextOutput_Arcs_mm.pp |
|
| Yにおける円弧の中点です(絶対座標)。 | TextOutput_Arcs_mm.pp |
|
| Xにおける円弧の中点です(増分座標)。 | TextOutput_Arcs_mm.pp |
|
| Yにおける円弧の中点です(増分座標)。 | TextOutput_Arcs_mm.pp |
|
| 円弧の半径です。 | Bosch_ATC_Arcs_mm.pp |
|
| 円弧の角度です。 | 汎用 HPGL_Arcs.pp |
|
| X軸のホーム工具位置です。 | CAMTech_CMC3_mm.pp |
|
| Y軸のホーム工具位置です。 | CAMTech_CMC3_mm.pp |
|
| Z軸のホーム工具位置です。 | CAMTech_CMC3_mm.pp |
|
| 安全高さ/早送りクリアランス間隔です。 | EMC2 アーク(インチ)(*.ngc) |
|
| 軸がラップされる円筒の直径です。 | Mach2_3_WrapY2A_ATC_Arcs_mm.pp |
|
| Xにおける素材の長さです。 | Mach2_3_ATC_Arcs_inch.pp |
|
| Yにおける素材の長さです。 | Mach2_3_ATC_Arcs_inch.pp |
|
| Zにおける素材の長さです。 | Mach2_3_ATC_Arcs_inch.pp |
|
| Xにおける素材の最小値です。 | MaxNC_インチ.pp |
|
| Yにおける素材の最小値です。 | MaxNC_インチ.pp |
|
| Zにおける素材の最小値です。 | MaxNC_インチ.pp |
|
| Xにおける素材の最大値です。 | MaxNC_インチ.pp |
|
| Yにおける素材の最大値です。 | MaxNC_インチ.pp |
|
| Zにおける素材の最大値です。 | MaxNC_インチ.pp |
|
| Xの原点位置です。 | TextOutput_Arcs_mm.pp |
|
| Yの原点位置です。 | TextOutput_Arcs_mm.pp |
|
| Zゼロ位置、テーブルまたは素材サーフェスです。 | TextOutput_Arcs_mm.pp |
|
| X,Y原点です。 | TextOutput_Arcs_mm.pp |
|
| 使用された工具のリストです(使用順)。 | Mach2_3_ATC_Arcs_inch.pp |
|
| ファイルで使用された工具経路のリストです(使用順)。 | Mach2_3_ATC_Arcs_inch.pp |
|
| 工具経路のメモです(工具経路設定フォーム)。 | Mach2_3_ATC_Arcs_inch.pp |
|
| ファイルのメモです(編集 > メモ)。 | Mach2_3_ATC_Arcs_inch.pp |
|
| ファイル作成時間です。 | Mach2_3_ATC_Arcs_inch.pp |
|
| ファイル作成日です。 | Mach2_3_ATC_Arcs_inch.pp |
|
| 穴あけ加工時のドウェル時間(秒)です。 | Mach2_3_Arcs_inch.pp |
|
| ファイルの出力に使用された製品名です(バージョン番号含む)。 | |
|
| 工具直径です。 | |
|
| Rotary: 現行の逆時間レートです。 | AvidCNC_WrapX2A_G93_inch.pp |
変数の形式
工具位置の値、送り速度、回転速度などは、変数を使用してファイルに挿入されます。ファイル全体で変数が使用されます。ファイルのポストプロセスが行われると、変数が当該アイテムの現行値で置換されます。
例えば、変数出力の[X]、[Y]、[Z]をそれぞれ使用して、いつの時点でも現行のXYZ工具位置がファイルに挿入されます。
明瞭性を保つために、変数名には大文字のみを使用します。
変数は以下のようにフォーマットされます。
VAR VARIABLE = [VO|WO|CS|VF|MX]
この場合
VO= X、XF、Fなどの変数出力です。WO= 出力がA=常時、C=変更時のみ行われます。CS= 文字列が値の前に出力されます。VF= 値が出力される形式を指定する値の形式です。MX= 乗数値です。
一般的な変数
1 | 2 | 3 | 4 | 6 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VAR- この行は変数です。- 変数名です。
- 等号です。
- 開始角括弧 - 変数フォーマットパラメーターの開始です。
- 変数ラベル - 変数値で代用されるラベルです。
- 縦棒 - パラメーターの区切りです。
A= 常に値を出力、C= 変更時のみ値を出力することを表します。- 縦棒 - パラメーターの区切りです。
- 変数値の前に印刷するための文字列です。
- 縦棒 - パラメーターの区切りです。
- 任意のフォーマットフラグ - (後述)。
- 値の形式 - 出力する単位と小数点以下の桁数です。
- 縦棒 - パラメーターの区切りです。
- 出力乗数 - (後述)。
- 終了角括弧 - フォーマットパラメーターの終了です。
出力値のフォーマット
値フォーマット文字列は、以下のようにフォーマットする必要があります。
FORMAT_FLAGS FIELD_WIDTH DECIMAL_SEPARATOR DECIMAL_PLACES
フォーマットフラグは任意で、後述するごく一部のコントローラーのみに必要です。
フィールド幅:出力される最少数の文字を表します。通常、フィールド幅は「1」に設定されます。それより大きな値は、コントローラーが値に対して固定数の文字を求める場合のみ必要になります。そのような場合には、1より大きな値を入力することができます。入力された値の文字数が、確実に出力されるようになります。フィールド幅を表す数値は、出力値の完全な浮動小数点(小数点記号)を含みます。
小数点:小数点記号は、ほとんどの場合でピリオドが使用されますが、一部のコントローラーではコンマが使用される場合があります。(ピリオドを使用しないポストプロセッサの例として、以下のファイルを参照してください。Heidenhain_inch.pp)
小数点位置:出力される小数点以下の桁数です。多くの場合で、メトリック法で操作されるコントローラーには3、インチ法のコントローラーには4が設定されます。
任意のフォーマットフラグ
出力値は、任意のフォーマットフラグを使用してさらに修正可能です。
フラグ | 機能 | デフォルト(フラグなし) |
| 値は右端に揃えられます。 | 値は右端に揃えられます。 |
| 値に「+」または「-」接頭辞を付けます。 | 値に「+」または「-」接頭辞を付けます。 |
| 値が設定された最小値未満の場合、値に接頭辞「0」を付けます。 | 値には空のスペースである接頭辞が付けられます。 |
| 値は常に区切り文字付きで出力されます(実際には、値が整数値のみを出力するように設定される場合に限り、出力値を変更します)。 | 出力が整数のみに設定されると、区切り文字は値にアペンドされません。 |
変数のデフォルトフォーマット
多くの変数にデフォルトの形式があります(以下参照)。変数に対して別の形式を設定するには、ポストプロセッサに以下の行を入力し、使用するコントローラーに適したパラメータに変更します。
デフォルト | サンプル |
|
行番号は常に出力されます。「N」文字が行番号の前に挿入されます。整数として出力されます。 |
|
回転速度は常に出力されます。「S」文字が値の前に挿入され、整数として出力されます。 |
|
送り速度は値の前に「F」文字で出力され、変更時のみ出力されます。値は小数位1桁まで出力されます。 注記 このフォーマット文字列では、任意の追加パラメーターがあります。これは値乗数です。 |
VAR PLUNGE_RATE = [FP|A||1.0] |
切り込み速度は値の前に「F」文字で出力され、変更時のみ出力されます。値は小数位1桁まで出力されます。 注記 このフォーマット文字列では、任意の追加パラメーターがあります。これは値乗数です。 |
|
加工速度は値の前に「F」文字で出力され、変更時のみ出力されます。値は小数位1桁まで出力されます。 注記 このフォーマット文字列では、任意の追加パラメーターがあります。これは値乗数です。 |
|
位置値は値の前に「X」文字で出力され、位置は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。 インチ法で操作されるコントローラーには、通常小数位4桁まで値を出力します。以下のように行をフォーマットします。
|
|
ホーム位置値は値の前に「X」文字で出力され、位置は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。 インチ法で操作されるコントローラーには、通常小数位4桁まで値を出力します。以下のように行をフォーマットします。
|
|
値は値の前に「X」文字で出力され、位置は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。 インチ法で操作されるコントローラーには、通常小数位4桁まで値を出力します。以下のように行をフォーマットします。
注記 このフォーマット文字列では、任意の追加パラメーターがあります。これは値乗数です。 |
|
値は値の前に「Y」文字を付けて出力され、値は常に出力され、小数点以下 3 桁まで出力されます。これは通常、メトリック出力を必要とするコントロールに適しています。 値は値の前に「Y」文字で出力され、値は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。
|
|
値は値の前に「J」文字を付けて出力され、値は常に出力され、小数点以下 3 桁まで出力されます。これは通常、メトリック出力を必要とするコントロールに適しています。 値は値の前に「J」文字で出力され、値は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。
|
|
値は値の前に「J」文字を付けて出力され、値は常に出力され、小数点以下 3 桁まで出力されます。これは通常、メトリック出力を必要とするコントロールに適しています。 値は値の前に「J」文字で出力され、値は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。
注記 このフォーマット文字列では、任意の追加パラメーターがあります。これは値乗数です。 |
|
値は値の前に「X」文字を付けて出力され、値は常に出力され、小数点以下 3 桁まで出力されます。これは通常、メトリック出力を必要とするコントロールに適しています。 値は値の前に「X」文字で出力され、値は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。
|
|
値は値の前に「X」文字を付けて出力され、値は常に出力され、小数点以下 3 桁まで出力されます。これは通常、メトリック出力を必要とするコントロールに適しています。 値は値の前に「X」文字で出力され、値は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。
|
|
値は値の前に「R」文字を付けて出力され、値は常に出力され、小数点以下 3 桁まで出力されます。これは通常、メトリック出力を必要とするコントロールに適しています。 値は値の前に「R」文字で出力され、値は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。
|
|
値は値の前に「A」文字を付けて出力され、値は常に出力され、小数点以下 3 桁まで出力されます。これは通常、メトリック出力を必要とするコントロールに適しています。 値は値の前に「A」文字で出力され、値は常に出力されます。また、一般的にはメトリック法の出力を必要とするコントロールに適した小数位3桁まで出力されます。
|
|
値は値の前に「X」文字で出力され、値は常に出力されます。また、小数位3桁まで出力されます。 |
乗数値
乗数値は、異なる値を出力するために値の乗算に使用されます。一般的な用途は、以下のとおりです。
インチ法のポストプロセッサのデフォルト出力を、分当たりのインチから秒あたりのインチに変換するため(0.01666を掛ける)。
メトリック法のポストプロセッサのデフォルト出力を、分当たりのmmから秒あたりのmmに変換するため(0.0166を掛ける)。
正の値を負の値(またはその逆)にするため(-1で掛ける)。
円弧角度の出力をラジアンから度数に変換するため(57.2957795で掛ける)。
固定係数で乗算または除算を行うため(1:4スケールモデルの生成、0.25で掛ける)。
ポストプロセッサのブロック
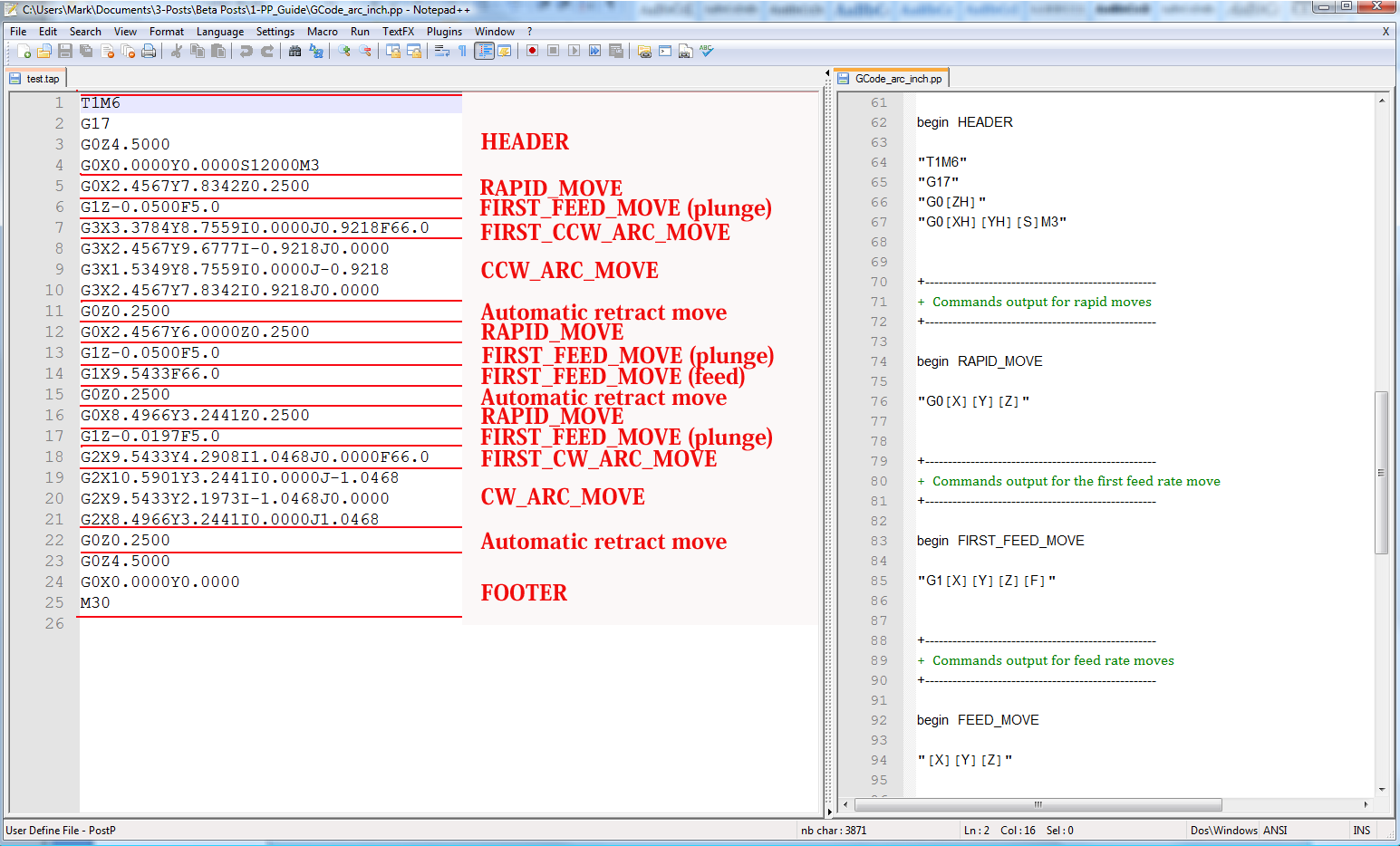
ヘッダ
+---------------------------------------------------
+ Commands output at the start of the file
+---------------------------------------------------
begin HEADER
"Commands"
ヘッダーは命令用のセクションで、ファイルの最初に一度出力されます。通常は、コントローラーの様式コマンドを設定します。
例えば、ヘッダーにはコントローラー上にファイル名を表示するためのコマンドや、マシンを設定するための一連の「Gコード」が含まれる場合があります。これには、コントローラに動作がインチで行われることを伝えるG20、またはミリメーターで行われることを伝えるG21などが相当します。
以下のような変数が、ヘッダーセクション内に含まれる場合があります。
以下のような変数が、ヘッダーセクション内に含まれる場合があります。
素材ブロックに関する情報
- Xの最小範囲 = [XMIN]
- Yの最小範囲 = [YMIN]
- Zの最小範囲 = [ZMIN]
- Xの最大範囲 = [XMAX]
- Yの最大範囲 = [YMAX]
- Zの最大範囲 = [ZMAX]
- Xの素材長さ = [XLENGTH]"
- Yの素材長さ = [YLENGTH]"
- Zの素材深さ = [ZLENGTH]"
ホーム位置の情報
- ホームX = [XH]
- ホームY = [YH]
- ホームZ = [ZH]
- 早送りクリアランス間隔または安全高さ = [SAFEZ]
最初に使用される工具の詳細
- 工具番号 = [T]
- 工具名 = [TOOLNAME]
初期加工速度
- 加工と素材への切込みに使用される送り速度 = [F]
- 工具が素材を加工する送り速度 = [FC]
- 工具が素材に切り込む送り速度 = [FP]
実際の値はUNITSセットにより異なります(グローバルファイル設定参照)。デフォルトはMM/分またはインチ/分のいずれかになりますが、出力は適切な「VAR FEED_RATE」フォーマットを設定することで変更することができます。
回転速度
- 回転速度 = [S] R.P.M.
スピンドル_オン
+---------------------------------------------------
+ Commands output at when the Spindle first turns on.
+---------------------------------------------------
begin SPINDLE_ON
"Commands"
Spindle On セクションは、ヘッダーの一部として Spindle on コマンドを持つ代わりに、同じポストプロセッサーでスピンドルとレーザーの操作を可能にするために追加されました。
通常、これにはスピンドルオンコマンド (M03 など) のみが含まれますが、スピンドル速度コマンド [S] を含めることもできます。
工具交換
+---------------------------------------------------
+ Commands output at toolchange
+---------------------------------------------------
begin TOOLCHANGE
"Commands"
工具変更が必要な場合に出力されるコマンドです。使用される可能性のある変数とコマンドは、以下のとおりです。
- 前の工具番号 = [TP]
- 工具番号 = [T]
- 工具名 = [TOOLNAME]
- 工具経路名 = [TOOLPATH_NAME]
- 工具経路のパス名 = [PATHNAME]
- 工具経路のファイル名 = [TP_FILENAME]
- 工具経路のファイルディレクトリ = [TP_DIR]
- 工具経路の拡張子 = [TP_EXT]
- 回転速度 = [S] R.P.M.
- M3 Mコードは、多くの場合でスピンドルをオンにするために使用されます(時計回りの回転)。
- M5 Mコードは、多くの場合でスピンドルをオフにするために使用されます。
NEW_SEGMENT
+---------------------------------------------------
+ Commands output for a new segment ( new toolpath with current toolnumber)
+---------------------------------------------------
begin NEW_SEGMENT
"Commands"
Mach2_3_ATC_Arcs_inch.pp
新規の工具経路が選択中の工具を使用する場合に出力されるコマンドです(ただし、異なる回転速度が必要な場合や、マシンに追加の命令が必要な場合など)。
工具変更は自動的にNEW_SEGMENTセクションの命令を呼び出すため、NEW_SEGMENTセクションで使用されるコマンドは、TOOLCHANGEセクション内に含まれる必要はありません。
一般的な変数は以下のとおりです。
- 回転速度 = [S] R.P.M.
- M3 Mコードは、多くの場合でスピンドルをオンにするために使用されます(時計回りの回転)。
- M5 Mコードは、多くの場合でスピンドルをオフにするために使用されます。
INITIAL_RAPID_MOVE
+---------------------------------------------------
+ Commands output for Initial rapid move
+---------------------------------------------------
begin INITIAL_RAPID_MOVE
"Commands"
Saom_OSAI_Arc_inch.pp
ヘッダーまたは工具変更に続いて、非常に高速の移動が行われる際に出力されるコマンドです。多くのポストで使用されないセクションですが、非常に高速の移動が、後続の早送り移動とは異なる情報の出力を必要とする場合に有用です。このセクションは、HPGL変数に必要になる場合があります。
RAPID_MOVE
+---------------------------------------------------
+ Commands output for rapid moves.
+---------------------------------------------------
begin RAPID_MOVE
"Commands"
早送り移動が必要な場合に出力されるコマンドです。
FIRST_FEED_MOVE
+---------------------------------------------------
+ Commands output for first feed rate move in a series of feed moves.
+---------------------------------------------------
begin FIRST_FEED_MOVE
"Commands"
通常このセクションは、コントローラーが最初の送り動作で送り速度の設定を要求する場合に使用されます。その後この速度は、後続の加工動作で使用されます。
Axyz_Arcs_ATC_inch.pp
FEED_MOVE
+---------------------------------------------------
+ Commands output for feed rate moves
+---------------------------------------------------
begin FEED_MOVE
"Commands"
FIRST_FEED_MOVEセクションがポストプロセッサ内に存在する場合に、各移動または最初の送り動作を除くすべての送り動作で必要な情報を出力するために使用されます。
FIRST_CW_ARC_MOVE
+---------------------------------------------------
+ Commands output for the first clockwise arc move in a series of cw arc moves
+---------------------------------------------------
begin FIRST_CW_ARC_MOVE
"Commands"
時計回りの円弧セグメントである点を除いて、FIRST_FEED_MOVEセクションに類似しています。通常このセクションは、コントローラーが最初の円弧セグメントに対する送り速度の設定を要求する場合に使用されます。その後この速度は、後続の同一方向の円弧動作に使用されます。
Centroid_Arcs_inch.pp
FIRST_CW_HELICAL_ARC_PLUNGE_MOVE
+---------------------------------------------------
+ Commands output for clockwise helical arc plunge move in a series of moves.
+---------------------------------------------------
begin FIRST_CW _HELICAL_ARC_MOVE
"Commands"
Zでも移動する動作である点を除いて、FIRST_CW_ARC_MOVEセクションに類似しています。送り速度は、工具の切込み速度セットから出力されます。
Mach2_3_ATC_Arcs_inch.pp
FIRST_CW_HELICAL_ARC_MOVE
+---------------------------------------------------
+ Commands output for clockwise helical arc move in a series of moves.
+---------------------------------------------------
begin FIRST_CW_HELICAL_ARC_MOVE
"Commands"
Zでも移動する動作である点を除いて、FIRST_CW_ARC_MOVEセクションに類似しています。
Mach2_3_ATC_Arcs_inch.pp
CW_ARC_MOVE
+---------------------------------------------------
+ Commands output for clockwise arc moves.
+---------------------------------------------------
begin CW_ARC_MOVE
"Commands"
時計回りの円弧セグメントである点を除いて、FEED_MOVEセクションに類似しています。
Centroid_Arcs_inch.pp
CW_HELICAL_ARC_MOVE
+---------------------------------------------------
+ Commands output for clockwise helical arc moves
+---------------------------------------------------
begin CW_HELICAL_ARC_MOVE
"Commands"
Zでも移動する動作である点を除いて、CW_ARC_MOVEセクションに類似しています。
Mach2_3_ATC_Arcs_inch.pp
FIRST_CCW_ARC_MOVE
+---------------------------------------------------
+ Commands output for the first counter-clockwise arc move in a series of ccw arc moves.
+---------------------------------------------------
begin FIRST_CCW_ARC_MOVE
"Commands"
反時計回りの円弧セグメントである点を除いて、FIRST_FEED_MOVEセクションに類似しています。通常このセクションは、コントローラーが最初の円弧セグメントに対する送り速度の設定を要求する場合に使用されます。その後この速度は、後続の同一方向の円弧動作に使用されます。
Centroid_Arcs_inch.pp
FIRST_CCW_HELICAL_ARC_PLUNGE_MOVE
+---------------------------------------------------
+ Commands output for counter- clockwise helical arc plunge move in a series of moves.
+---------------------------------------------------
begin FIRST_CCW_HELICAL_ARC_MOVE
"Commands"
Zでも移動する動作である点を除いて、FIRST_CCW_ARC_MOVEセクションに類似しています。送り速度は、工具の切込み速度セットから出力されます。
Mach2_3_ATC_Arcs_inch.pp
FIRST_CCW_HELICAL_ARC_MOVE
+---------------------------------------------------
+ Commands output for first counter-clockwise helical arc move in a series of moves.
+---------------------------------------------------
begin FIRST_CCW_HELICAL_ARC_MOVE
"Commands"
FIRST_CCW_ARC_MOVE セクションに似ていますが、Z 方向にも移動する移動用です。
CCW_HELICAL_ARC_MOVE セクションの例については、ファイル Mach2_3_ATC_Arcs_inch を参照してください。
CCW_ARC_MOVE
+---------------------------------------------------
+ Commands output for counter-clockwise arc moves.
+---------------------------------------------------
begin CCW_ARC_MOVE
"Commands"
反時計回りの円弧セグメントである点を除いて、FEED_MOVEセクションに類似しています。
Centroid_Arcs_inch.pp
CCW_HELICAL_ARC_MOVE
+---------------------------------------------------
+ Commands output for counter-clockwise helical arc moves
+---------------------------------------------------
begin CCW_HELICAL_ARC_MOVE
"Commands"
Zでも移動する動作である点を除いて、CCW_ARC_MOVEセクションに類似しています。
Mach2_3_ATC_Arcs_inch.pp
フッター
フッターは命令用のポストプロセッサのセクションで、ファイルの最後にコントローラーに送信されます。これには、工具をホーム位置に戻すための命令、スピンドルをオフにする命令、ドライブへの電源をオフにする命令などが含まれます。
+---------------------------------------------------
+ Commands output at the end of the file
+---------------------------------------------------
begin FOOTER
"Commands"
一般的な変数は以下のとおりです。
- G00 [XH] [YH] [ZH]は、XYZホーム位置に早送りします。
- M05 Mコードは、多くの場合でスピンドルをオフにするために使用されます。
- M30 M コードは、多くの場合でファイルの末尾を知らせるために使用されます。
スピンドル_オン
スピンドル オン セクションはヘッダーの後に使用され、ミリング/レーザー ポスト プロセッサーの組み合わせでスピンドル オン コマンドを使用できるようにします。
Spindle on コマンドがヘッダーで使用されている場合、このブロックは含めるべきではありません。
+---------------------------------------------------
+ Commands output at the end of the file
+---------------------------------------------------
begin SPINDLE_ON
"Commands"
一般的な変数は以下のとおりです。
- スピンドルオン用 M3
- [S] 主軸速度の場合
JETサポートセクション
これらのセクションは、レーザー、プラズマ、ウォータージェットなど、JETベースの加工工具をサポートするために使用されます。
JET_TOOL_POWER
+---------------------------------------------------
+ Commands output when the cutter's power is set
+---------------------------------------------------
begin JET_TOOL_POWER
"Commands"
Grbl.pp
レーザー「工具」に関連付けられた電源設定が発行されると出力されるコマンドです。
JET_TOOL_ON
+---------------------------------------------------
+ Commands output when the cutter's power is turned ON
+---------------------------------------------------
begin JET_TOOL_ON
"Commands"
Grbl.pp
JET工具の電源がオンになると出力されるコマンドです。これは、広い意味ではSPINDLE_ONに相当します。しかし、JETカッターがすでに予定される加工高さにある場合に、スピンドルベースのカッターに要求される切り込み動作の前ではなく、切り込み動作の最後に発行されます。
JET_TOOL_OFF
+---------------------------------------------------
+ Commands output when the cutter's power is turned OFF
+---------------------------------------------------
begin JET_TOOL_OFF
"Commands"
Grbl.pp
JET工具の電源がオフになると出力されるコマンドです。
使用頻度の低い他のセクション
FEED_RATE_CHANGE
+---------------------------------------------------
+ Commands output when feed rate changes
+---------------------------------------------------
begin FEED_RATE_CHANGE
"Commands"
Gravograph_IS200.pp
送り速度の変更時に出力されるコマンドです。多くのコントローラーが別の命令にアペンドされた送り速度の変更を受け入れるため、このセクションはほとんど使用されません。しかし、HPGL変数と使用される場合があります。
FIRST_PLUNGE_MOVE
+---------------------------------------------------
+ Commands output for the First Plunge Move, in a series of plunge moves.
+---------------------------------------------------
begin FIRST_PLUNGE_MOVE
"Commands"
Holz-Her_7123_ATC_Arcs_mm.pp
このセクションは、多くの場合で同時3D移動を完全にはサポートしないマシンで使用されます。例えば、Z軸がXとY軸ほど早く移動できない場合などが相当します。また、このセクションは、最初の切り込み動作が発生するたびに出力させるコマンドを含めるためにも使用されます。たとえば、プラズマトーチをオンにするコマンドなどです。複数の切込みは、通常ではランプ動作内でのみで出力されます。そのため、このコマンドは、加工間で自動的に早送りするコントロールに有用です。この場合、変更される速度や送りのような命令は、最初のプランジ動作で指定される必要がありますが、当該命令はランプ操作内の後続のプランジ動作には不要になります。
プランジムーブ
+---------------------------------------------------
+ Commands output for Plunge Moves
+---------------------------------------------------
begin PLUNGE_MOVE
"Commands"
Burny_arc_inch.pp
このセクションは、多くの場合で同時3D移動を完全にはサポートしないマシンで使用されます。例えば、Z軸がXとY軸ほど早く移動できない場合などが相当します。また、このセクションは切り込み動作が発生するたびに出力させるコマンドを含めるためにも使用されます。たとえば、プラズマトーチをオンにするコマンドなどです。
RETRACT_MOVE
+---------------------------------------------------
+ Commands output for Retract Moves
+---------------------------------------------------
begin RETRACT_MOVE
"Commands"
Burny_arc_inch.pp
このセクションには、プラズマトーチをオフにするコマンドを含めるために使用することができます。
DWELL_MOVE
+---------------------------------------------------
+ Commands output for Dwell Commands
+---------------------------------------------------
begin DWELL_MOVE
"Commands"
Mach2_3_Arcs_inch.pp
このコマンドは、VCarve Pro 7.5とAspire 4.5以降のバージョン用に導入されました。これは、ドウェル時間がプログラム内で指定されている場合に、穴あけ工具経路で使用されます。このセクションが未定義の場合、すべてのドウェルコマンドが無視されます。しかし、残りの穴あけ工具経路は、通常どおり出力されます。DWELL変数は、変数セクションで説明します。
特殊文字
ポストプロセッサ出力ステートメントの制限の範囲内で、多くの文字の出力が可能です。しかし、ポストプロセッサ構成ファイル内では、特殊な意味を持つ特定の文字があり、該当する文字の直接出力はできません。
これらには、角括弧[ ]や二重引用符“が該当します。しかし、このような文字の出力が必要になる場合があります。
その場合、以下の例のように、出力を希望する特殊文字のASCII値の10進相当を角括弧で囲んで行うことができます。この方法は、印刷不可の文字を含むすべてのASCII値の挿入に利用可能です。
- [91] 左側の角括弧を出力します。
- [93] 右側の角括弧を出力します。
- [34] 二重引用符を出力します。
- [13] キャリッジリターン(復帰)を出力します。
- [10] ラインフィード(改行)を出力します。
Biesse_Rover_Arcs_mm.pp
例: 工具変更コマンドの追加
ほとんどの場合、コントローラーに合わせてカスタマイズされたポスト プロセッサーを作成する最も迅速かつ簡単な方法は、既存のポスト プロセッサーを編集することです。これを行うには、まず、ポスト プロセッサの出力をテストするために使用できる簡単なテスト ファイルを作成します。単純なファイルは、1 つの線と 2 つの円で構成されます。それぞれの形状に対して浅い切削プロファイルのツールパスを作成し、線の「上」、一方の円の「内側」、もう一方の円の「外側」を加工します。
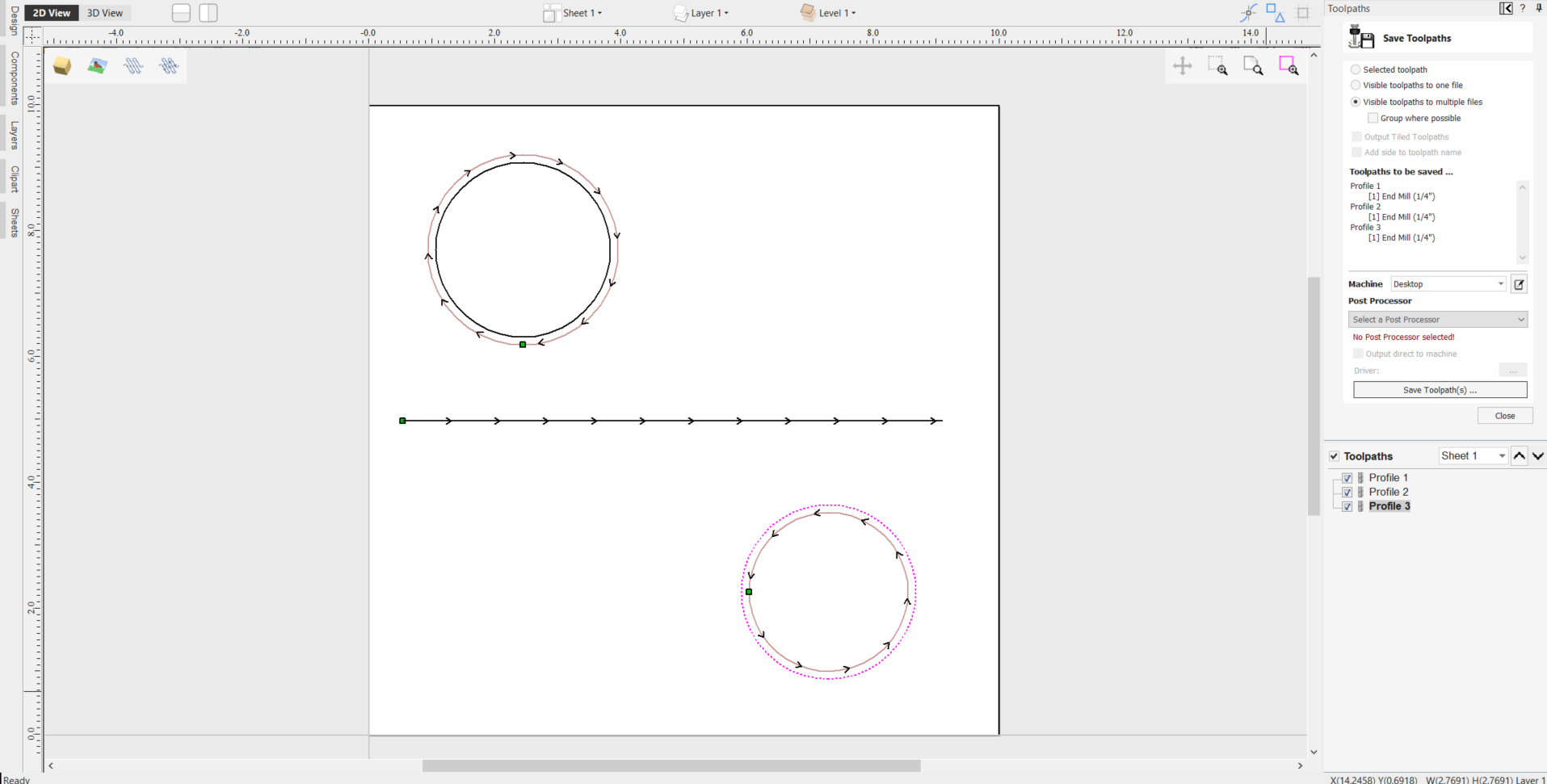
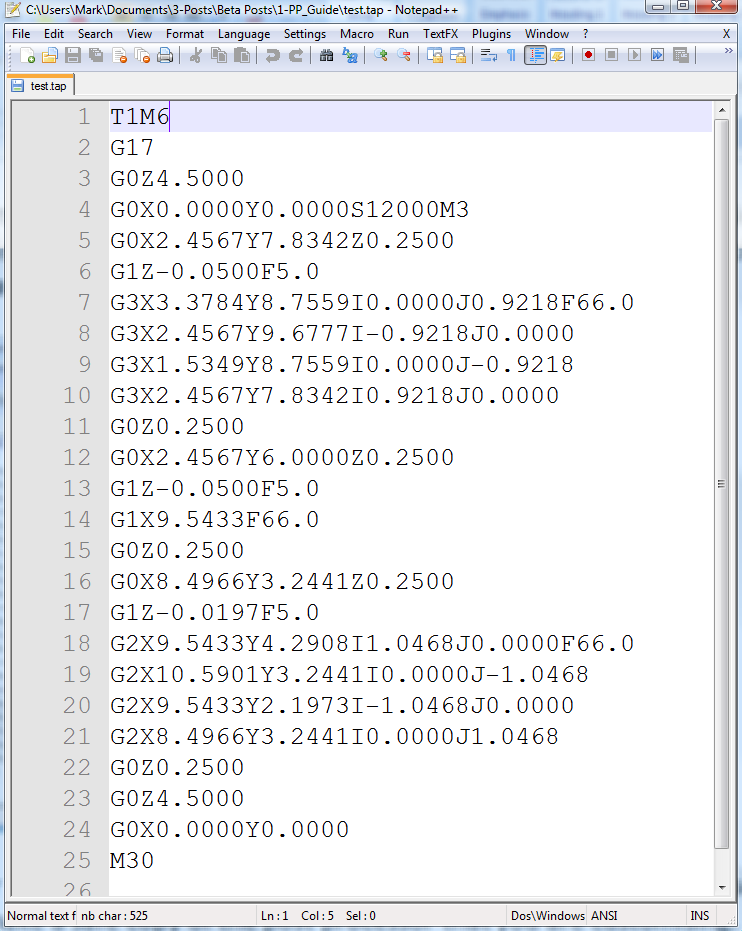
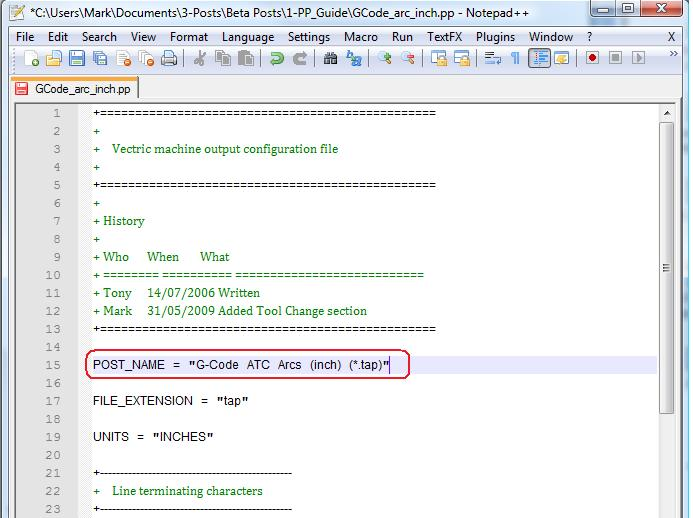
基本ポスト プロセッサを使用してツールパスを保存し、お気に入りのテキスト エディタを使用してそれを確認します。以下は、「G-Code Arcs (inch) (*.tap)」ポスト プロセッサを使用して投稿されたテスト ファイルの例です。以下の例は、一般的な Notepad ++ エディタを使用して表示されます。
この例では、このポストプロセッサにツール変更セクションを追加します。マシンメニューの下の「マシン構成」オプションに移動します。
[関連付けられたポスト プロセッサ] セクションで、(+) アイコンをクリックし、リストを下にスクロールして、リスト内でポスト プロセッサを見つけます。
それを右クリックして カスタマイズ
を選択します。ポストプロセッサの新しいコピーがリストの一番上に表示され、その横にペンのアイコンが表示されます。
このコピーを右クリックして 開いているファイルの場所
を選択します。これにより、.pp ポスト プロセッサ ファイル自体が含まれる Windows フォルダが開きます。コマンドを調整する必要がある場合は、このファイルを直接編集できます。特定のマシンのセットアップ。これらの .pp ポスト プロセッサ ファイルは、標準的なテキスト エディタ ソフトウェアで編集できます。
ツール交換セクションをポストプロセッサに追加するには、工作機械 (または制御ソフトウェア) の制御に関するドキュメントを参照する必要があります。この例では、特定の工作機械の工具交換を実行するために追加する必要がある命令が次のとおりであると仮定します。
- M05 工具交換前に主軸をオフにする指示。
- M0 既存の工具を工具ホルダに戻す命令。
- M06TTool_Number n 新しいツールを選択する命令 Tool_Number n
- G43HTool_Number n 使用する制御の命令 工具 n の工具長オフセット
- Sxxx M03 スピンドル速度を xxx に設定します。スピンドルをオンにします (時計回りに回転)。
任意のテキストエディタを使用してポストプロセッサを編集
コンピュータのオペレーティング システムが Microsoft Vista で、ユーザー アクセス制御が有効になっている場合は、編集中のポスト プロセッサを PostP フォルダからユーザー領域の下のフォルダにコピーまたは移動します。
ファイル内で最初に編集する必要があるのは、履歴コメント セクションです。変更の記録が残るようにします。
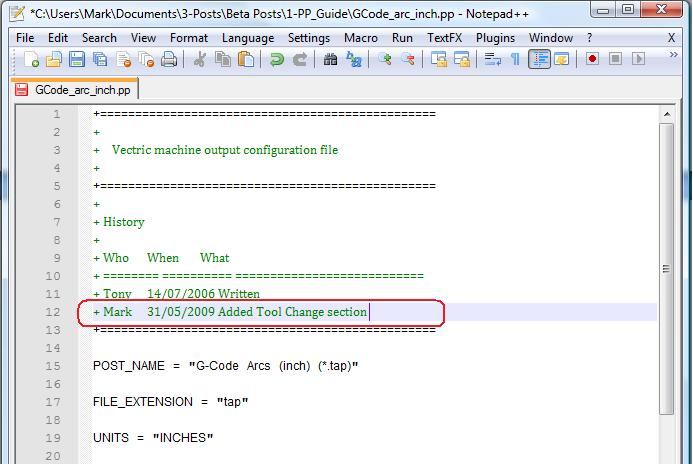
次に、このポスト プロセッサが自動工具交換 (ATC) コマンドを出力することを反映するように POST_NAME を編集します。新しいポストは、ポスト プロセッサのリストに「G-Code ATC Arcs (inch)(*.tap)」として表示されます。
次に、手順を含むツール変更セクションを追加します。ファイル内の新しいセクションの場所は重要ではありませんが、ヘッダー セクションと Rapid Move セクションの間に挿入するのが適切な場所です。
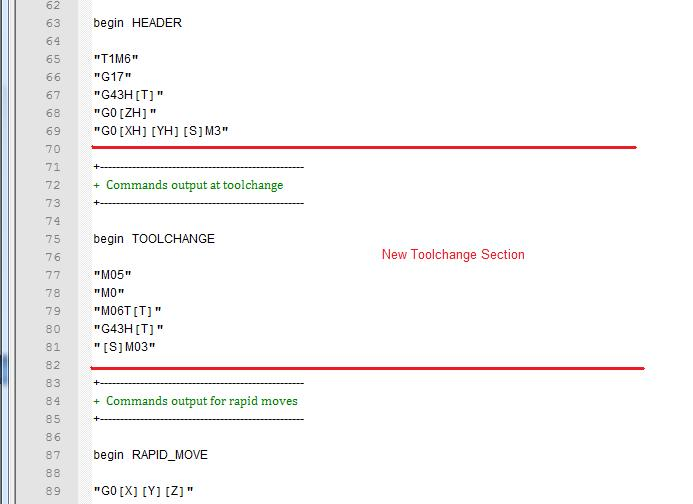
新しいセクションの先頭に (+ 文字で始まる) コメント行を追加してセクションを説明し、ファイル全体を読みやすくします。次に、「begin TOOLCHANGE」という行を入力して、すべての工具交換に対して次の命令が出力されるようにポストプロセッサに指示します (最初の工具選択を除き、これらのコマンドはヘッダー セクションに含まれています)。
次のステップでは、必要な指示を二重引用符で囲んで入力します。この例の 3 番目と 4 番目の命令行の「[T]」は、ファイルが後処理されるときにツール番号に置き換えられます。 5行目の「[S]」は工具の主軸速度に置き換えられます。
最後に、POST_NAME を変更したので、ファイルへの変更を保存する必要があります。新しい名前 (「GCODE_ATC_Arcs_inch.pp」など) を使用してファイルを保存します。
コンピュータのオペレーティング システムが Microsoft Windows 7 または Microsoft Vista で、ユーザー アクセス制御が有効になっている場合は、編集したファイルを「PostP」フォルダにコピーして戻します。
新しいポストプロセッサをテストするには、ソフトウェアが実行中の場合は、ソフトウェアを再起動します。
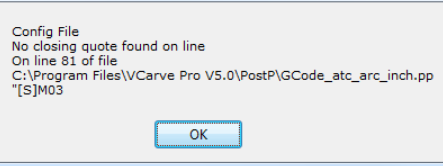
ポスト プロセッサに構文エラーがある場合、ソフトウェアの起動時に次の図のようなエラーが表示され、編集したポスト プロセッサがポスト プロセッサ構成ファイルのドロップダウン リストに表示されません。エラーを修正し、ソフトウェアを再起動する必要があります。
ソフトウェアの起動時にエラーが表示されない場合は、テスト ファイルを開いて 1 つ以上のテスト ツールパスを保存します。
ポストプロセッサ設定のドロップダウンリストからポストプロセッサを選択し、「ツールパスを保存」ボタンを押します。
テキスト エディターで保存したファイルを見てください。
ファイルの内容に問題がない場合は、そのファイルをマシン上で試してください。
変更されたポストプロセッサからの出力を初めて実行するときは、必要な予防措置をすべて講じてください。
例: ファイル拡張子の変更
ポストプロセッサによって自動的に生成されるファイル拡張子は、[ツールパスを保存] ボタンをクリックすると、[名前を付けて保存] ダイアログ ボックス内で変更できます。
ただし、毎回ファイル拡張子を変更するのではなく。ポストプロセッサによって生成されるファイル拡張子を永続的に変更する方が便利です。
これをする:
この例では、このポストプロセッサにツール変更セクションを追加します。マシンメニューの下の「マシン構成」オプションに移動します。
[関連付けられたポスト プロセッサ] セクションで、(+) アイコンをクリックし、リストを下にスクロールして、リスト内でポスト プロセッサを見つけます。
それを右クリックして カスタマイズ
を選択します。ポストプロセッサの新しいコピーがリストの一番上に表示され、その横にペンのアイコンが表示されます。
このコピーを右クリックして 開いているファイルの場所
を選択します。これにより、.pp ポスト プロセッサ ファイル自体が含まれる Windows フォルダが開きます。コマンドを調整する必要がある場合は、このファイルを直接編集できます。特定のマシンのセットアップ。これらの .pp ポスト プロセッサ ファイルは、標準的なテキスト エディタ ソフトウェアで編集できます。
任意のテキストエディタを使用してポストプロセッサを編集
コンピュータのオペレーティング システムが Microsoft Windows 7 または Microsoft Vista で、ユーザー アクセス制御が有効になっている場合は、編集中のポスト プロセッサを PostP フォルダからユーザー領域の下のフォルダにコピーまたは移動します。
ポストプロセッサ構成ファイル内で、次の 2 行で始まる行を探します。
POST_NAME =
FILE_EXTENSION =
それに応じてこれらを変更します。
たとえば、「G コード ATC (インチ)(*.tap)」ポストプロセッサによって生成されるファイル拡張子を「.tap」から「.nc」に変更したいとします。次に、行を編集します。
POST_NAME = "G Code ATC (inch) (*.tap)"
FILE_EXTENSION = "tap"
彼らに読ませるために:
POST_NAME = "G Code ATC (inch) (*.nc)"
FILE_EXTENSION = "nc"
変更をファイルに保存します。コンピュータのオペレーティング システムが Microsoft Windows 7 または Microsoft Vista で、ユーザー アクセス制御が有効になっている場合は、編集したファイルを「PostP」フォルダにコピーして戻します。
新しいポストプロセッサをテストするには、ソフトウェアが実行中の場合は、ソフトウェアを再起動します。ポスト プロセッサに構文エラーがある場合、ソフトウェアの起動時に次の図のようなエラーが表示され、編集したポスト プロセッサがポスト プロセッサ構成ファイルのドロップダウン リストに表示されません。エラーを修正し、ソフトウェアを再起動する必要があります。
ソフトウェアの起動時にエラーが表示されない場合は、テスト ファイルを開いて 1 つ以上のテスト ツールパスを保存します。
ポストプロセッサ設定のドロップダウンリストからポストプロセッサを選択し、「ツールパスを保存」ボタンを押します。
テキスト エディターで保存したファイルを見てください。
ファイルの内容に問題がない場合は、そのファイルをマシン上で試してください。
変更されたポストプロセッサからの出力を初めて実行するときは、必要な予防措置をすべて講じてください。
ヒント
最初からやり直す場合を考慮し、必ず編集を行うポストプロセッサのコピーを作成してください。
ポストプロセッサの編集にMicrosoft Wordなどのワードプロセッサプログラムを使用する場合は、ファイルをテキスト形式で保存してください。
ファイルにフォーマット情報を含めることはできません。
Microsoft Windows 7またはMicrosoft Vistaを実行するコンピューターでポストプロセッサを編集する場合は、「Program Files\Product folder\PostP」フォルダー内で直接ファイルの編集を行わないでください。常に、ユーザー領域内でファイルを編集し、編集済みのファイルを「Program Files\Product folder\PostP」にコピーしてください。
変更を加える場合は、「+」または「|」文字で開始するコメントを使用してください。
コメントはプログラムに作用しませんが、変更の記録により、将来変更を理解する際に役立ちます。
全ての命令を二重引用符で囲んでください。
可能な限り、行番号を利用できるテキストエディタを使用してください。ファイル内でエラーが検出され、ポストプロセッサのデバッグを行う際に有用です。プログラムの開始時に、プログラムはPostPフォルダー内のポストプロセッサをチェックします。ファイル内に構文エラーが存在する場合、最初に検出された行番号を示すエラーメッセージが表示されます。
ポストプロセッサの編集が完了したら、必ずコピーを作成してください。より新しいバージョンのVectric製品をインストールする場合は、新バージョンのソフトウェアのPostPフォルダーに修正済みのポストプロセッサをコピーしてください。初めて工具経路を保存する際に、修正済みのポストプロセッサを選択してください(ソフトウェアは選択を記憶するため後続動作では不要)。
別バージョンのソフトウェアをインストール、またはソフトウェアのバージョンをアップグレードする場合は、新バージョンのPostPフォルダーに修正済みのポストプロセッサをコピーしてください。初めてファイルのポストプロセスを行う場合は、ソフトウェアの新バージョンが使用されるように、適切なポストプロセッサを選択してください。
新しいバージョン(V5.5以降)のソフトウェアでは、アプリケーションで「ファイル > アプリケーションデータフォルダーを開く...\PostP」をクリックして、ポストプロセッサにアクセスすることができます。
ポストプロセッサのカスタマイズリストは、「ファイル > アプリケーションデータフォルダーを開く...\My_PostP」に必要なポストプロセッサのみをコピーして作成することができます。.ppファイル拡張子を持つファイルが「My_PostP」フォルダーに存在する場合、「My_PostP」フォルダーに存在するポストプロセッサのみが、ポストプロセッサのドロップダウンリストに表示されます。
ポストプロセッサの命名規則
製品に付属のポスト プロセッサ内では、次の用語または略語が使用されています。
- 円弧または円弧 = ポストプロセッサは、円弧の移動に応じてデザイン内の真の円弧を出力します (G2、G3、円弧の半径など)。
- Inc = 円弧は、最後の移動から増加する中心座標で出力されます。
- Abs = 円弧は絶対座標値で出力されます。
- ATC = ポストプロセッサは自動工具交換 (ATC) コマンドを出力します。
- WY = ラップアウトされた出力ポストプロセッサ – X 軸の周囲にラップされた Y 値
- WX = ラップアウトされた出力ポストプロセッサ – Y 軸の周囲にラップされた X 値
- TSnumber = テープ分割ポストプロセッサ。
- オプションの数値は、1 つのファイル内で出力される最大行数です。この行数を超えるファイルは複数のファイルに分割されます。 (詳細については、「テープ分割のサポート」を参照してください)。
- (mm) = ポストプロセッサーの単位はメートル法です。
- (インチ) = ポストプロセッサ単位は英国 (インペリアル) インチです。
- (*.xyz) = 出力ファイルが作成されるファイル拡張子。