Traitement post-processeur
 Que fait le post-processeur ?
Que fait le post-processeur ?
Le post-processeur est la section du programme qui convertit les coordonnées XYZ des mouvements d'outil dans un format adapté à un routeur ou une machine-outil particulière. Ce document explique comment créer et modifier les fichiers de configuration qui personnalisent la sortie du programme en fonction d'un contrôle de machine particulier.
Vous trouverez ci-dessous les sections d'un programme typique qui a été post-traité à la fois en G-Code et en HPGL.
Sortie code G
T1 M6
G17
G0 Z4.5000
G0 X0.0000 Y0.0000 S12000 M3
G0 X2.4567 Y7.8342 Z0.2500
G1 Z-0.0500 F5.0
G3 X3.3784 Y8.7559 I0.0000 J0.9218 F66.0
G3 X2.4567 Y9.6777 I-0.9218 J0.0000
G3 X1.5349 Y8.7559 I0.0000 J-0.9218
Sortie HPGL
IN;PA;
PU2496,7960;
PD2496,7960;
AA2496,8896,90.000
AA2496,8896,90.000
AA2496,8896,90.000
AA2496,8896,90.000
PU2496,7960;
PU2496,6096;
Les fabricants de contrôleurs de machines personnalisent souvent le format de fichier requis pour que les programmes s'exécutent sur une machine particulière afin d'optimiser le contrôle en fonction des caractéristiques individuelles de cette machine.
Le post-processeur Vectric utilise des fichiers de configuration simples basés sur du texte, pour permettre à l'utilisateur de personnaliser un fichier de configuration, s'il le souhaite.
Sections du post-processeur
Les post-processeurs Vectric sont divisés en sections pour faciliter la clarté, essayez d'écrire vos post-processeurs dans un style similaire pour faciliter le débogage.
Commentaires sur le dossier
Une section dans laquelle vous pouvez décrire le post-processeur et enregistrer toutes les modifications apportées au post-processeur. Chaque ligne est un commentaire et commence par un caractère « + » ou un « | » personnage.
+ History
+ Who When What
+ ======== ========== ===========================
+ Tony 14/07/2006 Written
+ Mark 26/08/2008 Combined ATC commands, stop spindle on TC
+================================================
Déclarations de fichiers globaux
Les instructions sont des éléments qui ne sont utilisés qu'une seule fois ou qui ont des valeurs statiques tout au long du fichier. Pour plus de clarté, écrivez les noms des déclarations en lettres majuscules..
Déclaration | Résultat |
| Le nom qui apparaîtra dans la liste des post-processeurs |
| L'extension de fichier que le fichier recevra |
| Les unités générées par le fichier (INCHES ou MM) |
| Le fabricant de la machine-outil a fourni un pilote (généralement un pilote d'imprimante) qui peut directement accepter la sortie du fichier CN (par exemple, voir HPCL_Arcs.pp générique) |
| Indique que les mouvements de plongée jusqu'à la hauteur de plongée (Z2) (définie sur le formulaire de configuration du matériau) sont des mouvements rapides. |
| Le logiciel de contrôle utilise une interface de document qui peut accepter directement la sortie du fichier CN. |
| Les mouvements sur l'axe Y doivent être enroulés autour d'un cylindre du diamètre spécifié. Les valeurs "Y" seront affichées sous la forme "A". |
| Les mouvements sur l'axe X doivent être enroulés autour d'un cylindre du diamètre spécifié. Les valeurs "X" seront affichées sous la forme "B". |
| La vitesse de broche de cette machine est indiquée sous la forme d'une plage de nombres entiers compris entre 1 et 15 représentant la vitesse réelle en tr/min de la broche (entre 4 500 et 15 000 tr/min dans l'exemple cité). Pour un exemple, voir le fichier : Roland_MDX-40_mm.pp |
| Cette commande vous permet de remplacer un caractère affiché dans les variables (telles que Les caractères sont saisis par paires, Original - Substitué. Par exemple, le logiciel de contrôle MACH 3 utilise des parenthèses comme délimiteurs de commentaires et n'autorise pas les commentaires imbriqués. La plupart des outils de la base de données d'outils Vectric ont des parenthèses dans la section « Nom » ; si ces noms sont affichés, cela provoquerait une erreur dans Mach3. La commande |
| Rotatif : Active/Désactive la sortie de la vitesse d'avance F en mode d'avance à temps inverse. Dans ce mode, nous sommes censés effectuer un mouvement en un divisé par le nombre F de minutes. In GCode, this would G93 to switch on, or G94 to switch off and use units mode. |
| Indique que ce post-processeur prend en charge les parcours d'outils laser (si le Module laser est installé). |
| Rayon d'arc minimum en option. Les arcs dont le rayon est inférieur à cette valeur seront remplacés par un seul mouvement en ligne droite. |
| Rayon d'arc maximum en option. Les arcs qui ont un rayon supérieur à cette valeur seront polygonisés. |
POST_BASE | Il s'agit d'une N'est plus pris en charge façon d'hériter du contenu d'un autre post-processeur. Voir la page Migration POST_BASE pour plus de détails. |
Support pour la division de la bande
Une section qui décrit comment une sortie de parcours d'outil long sera divisée :
TAPE_SPLITTING=MAX_NUM_LINES LINE_TOL "FILENAME_FORMAT" START_INDEX INDEX_ON_FIRST_FILE
Par exemple une commande de :
TAPE_SPLITTING=1000 100 "%s_%d.tap" 1 "YES"
conduirait à...
La sortie sera divisée en plusieurs fichiers d'un maximum de 1 000 lignes (+ quel que soit le nombre de lignes contenues dans la section de pied de page du post-processeur). Si un mouvement de retrait existe après la ligne 900 (1 000 – 100), le fichier sera divisé. à ce mouvement. Si le fichier s'appelait "toolpath", les fichiers fractionnés seraient nommés toolpath_1.tap, toolpath_2.tap etc. La première sortie du parcours d'outil sera "toolpath_ 1.tap", il n'y aura pas de fichier nommé "toolpath" sans numéro d'index, ( car INDEX_ON_FIRST_FILE=YES est utilisé), sauf si le fichier faisait moins de 1 000 lignes, auquel cas le fichier ne serait pas divisé.
Note
Certains contrôleurs qui nécessitent le fractionnement des fichiers CN ont également des limitations sur le nombre de caractères dans un nom de fichier. Par exemple, ils peuvent exiger que le fichier soit nommé avec le format de nom de fichier de style MSDOS 8.3. Ceci doit être pris en compte lors du nom du fichier de sortie.
Caractères de terminaison de ligne
LINE_ENDING="[13][12]"
Valeurs décimales des caractères ajoutés à chaque ligne séparée du fichier post-traité. (sera généralement [13][10]) (retour chariot, saut de ligne) pour tout contrôleur pouvant lire un fichier texte au format Windows ou MSDOS.
Numérotation des blocs
Si vous souhaitez ajouter des numéros de ligne au fichier de sortie, le numéro de ligne actuel est ajouté avec la variable [N]. Le comportement de cette variable de numéro de ligne est contrôlé par les variables suivantes :
Déclaration | Résultat |
| Valeur à laquelle doit commencer la numérotation des lignes |
| Valeur incrémentale entre les numéros de ligne |
| Le numéro de ligne maximum à afficher, avant de revenir à la valeur Important - Certains contrôleurs ont une limite au nombre de lignes pouvant être affichées sur le contrôle. |
Variables
Nom de la variable | Sortie en utilisant | Valeur | Exemple de fichier |
|
| Vitesse d'alimentation actuelle. | Mach2_3_ATC_Arcs_inch.pp |
|
| Vitesse d'avance de coupe actuelle. | CNCShark-USB_Arcs_inch.pp |
|
| Taux d'avance de plongée actuel. | CNCShark-USB_Arcs_inch.pp |
|
| Vitesse actuelle de la broche en tr/min | GCode_arc_inch.pp |
|
| Réglage de puissance actuel pour les outils à jet (par exemple les lasers) | grbl_mm.pp |
|
| Numéro d'outil actuel. | Mach2_3_ATC_Arcs_inch.pp |
|
| Numéro d'outil précédent. | NC-Easy.pp |
|
| Numéro de ligne. | Mach2_3_ATC_Arcs_inch.pp |
|
| Nom de l'outil actuel. | MaxNC_inch.pp |
|
| Texte du champ Note dans ToolDB pour l'outil actuel | Busellato_Jet3006_arc_inch.pp |
|
| Nom du parcours d'outil actuel. | Viccam_ATC_Arcs_inch.pp |
|
| Nom de fichier (produit par « Enregistrer le(s) parcours d'outil »). | ez-Router_inch.pp |
|
| Le fichier de parcours d'outil du dossier a été enregistré. | Woodp_arc_mm.pp |
|
| Extension de fichier de parcours d'outil. | TekcelE_Arc_ATC_3D.pp |
|
| Nom du chemin d'accès au dossier de parcours d'outil. | WinPC-NC_ATC_Arcs_mm.pp |
|
| Coordonnée actuelle de la position de l'outil sur l'axe X. | GCode_arc_inch.pp |
|
| Coordonnée actuelle de la position de l'outil sur l'axe Y. | GCode_arc_inch.pp |
|
| Coordonnée actuelle de la position de l'outil sur l'axe Z. | GCode_arc_inch.pp |
|
| Coordonnée actuelle de la position de l'outil dans l'axe A. | |
|
| Centre de l'arc sur l'axe X (par rapport à la dernière position X, Y). | Mach2_3_ATC_Arcs_inch.pp |
|
| Centre de l'arc sur l'axe Y (par rapport à la dernière position X, Y). | Mach2_3_ATC_Arcs_inch.pp |
|
| Centre de l'arc sur l'axe X (coordonnées absolues). | Isel_arc_mm.pp |
|
| Centre de l'arc sur l'axe Y (coordonnées absolues). | Isel_arc_mm.pp |
|
| Position de départ d'un arc sur l'axe X. | TextOutput_Arcs_mm.pp |
|
| Position de départ d'un arc sur l'axe Y. | TextOutput_Arcs_mm.pp |
|
| Milieu de l'arc en X (coordonnées absolues). | TextOutput_Arcs_mm.pp |
|
| Milieu de l'arc en Y (coordonnées absolues). | TextOutput_Arcs_mm.pp |
|
| Milieu de l'arc en X (coordonnées incrémentales). | TextOutput_Arcs_mm.pp |
|
| Milieu de l'arc en Y (coordonnées incrémentales). | TextOutput_Arcs_mm.pp |
|
| Le rayon d'un arc. | Bosch_ATC_Arcs_mm.pp |
|
| L'angle d'un arc. | HPGL_Arcs.pp générique |
|
| Position d'origine de l'outil pour l'axe X. | CAMTech_CMC3_mm.pp |
|
| Position d'origine de l'outil pour l'axe Y. | CAMTech_CMC3_mm.pp |
|
| Position d'origine de l'outil pour l'axe Z. | CAMTech_CMC3_mm.pp |
|
| Hauteur Z sûre/espace de dégagement rapide. | Arcs EMC2 (pouces)(*.ngc) |
|
| Diamètre du cylindre autour duquel l’axe est enroulé. | Mach2_3_WrapY2A_ATC_Arcs_mm.pp |
|
| Longueur du matériau en X. | Mach2_3_ATC_Arcs_inch.pp |
|
| Longueur du matériau en Y. | Mach2_3_ATC_Arcs_inch.pp |
|
| Longueur du matériau en Z. | Mach2_3_ATC_Arcs_inch.pp |
|
| Valeur minimale du matériau en X. | MaxNC_inch.pp |
|
| Valeur minimale du matériau en Y. | MaxNC_inch.pp |
|
| Valeur minimale du matériau en Z. | MaxNC_inch.pp |
|
| Valeur maximale du matériau en X. | MaxNC_inch.pp |
|
| Valeur maximale du matériau en Y. | MaxNC_inch.pp |
|
| Valeur maximale du matériau en Z. | MaxNC_inch.pp |
|
| Position d'origine dans X. | TextOutput_Arcs_mm.pp |
|
| Position d'origine dans Y. | TextOutput_Arcs_mm.pp |
|
| Z Position zéro, table ou surface du matériau. | TextOutput_Arcs_mm.pp |
|
| X, Y Origine. | TextOutput_Arcs_mm.pp |
|
| Liste des outils utilisés (par ordre d'utilisation). | Mach2_3_ATC_Arcs_inch.pp |
|
| Liste des parcours d'outils utilisés dans le fichier (par ordre d'utilisation). | Mach2_3_ATC_Arcs_inch.pp |
|
| Notes de parcours d'outil (formulaire de contrôle de parcours d'outil). | Mach2_3_ATC_Arcs_inch.pp |
|
| Notes de fichier (Édition > Notes). | Mach2_3_ATC_Arcs_inch.pp |
|
| Heure de création du fichier. | Mach2_3_ATC_Arcs_inch.pp |
|
| Date de création du fichier. | Mach2_3_ATC_Arcs_inch.pp |
|
| Temps de séjour en secondes lors du perçage. | Mach2_3_Arcs_inch.pp |
|
| Nom du produit utilisé pour générer le fichier, y compris le numéro de version. | |
|
| Diamètre de l'outil. | |
|
| Rotatif : taux de temps inverse actuel | AvidCNC_WrapX2A_G93_inch.pp |
Format des variables
Les valeurs de position de l'outil, d'avance, de vitesse de broche, etc. sont insérées dans le fichier à l'aide de variables. Les variables sont utilisées dans tout le fichier ; les variables sont remplacées par la valeur actuelle de cet élément lors du post-traitement du fichier. Par exemple, les positions actuelles des outils X, Y et Z à tout moment sont insérées dans le fichier en utilisant la sortie variable, [X], [Y] et [Z] respectivement.
Écrivez les noms des variables en lettres majuscules pour plus de clarté.
Une variable est formatée comme suit :
VAR VARIABLE = [VO|WO|CS|VF|MX]
où
VO= Sortie variable par exemple X, XF ou F.WO= Lors de la sortie, A=Toujours, C=Uniquement en cas de modification.CS= Chaîne de caractères sortie avant la valeur .VF= Format de la valeur, détermine le format avec lequel la valeur est sortie.MX= Valeur du multiplicateur.
Une variable typique
1 | 2 | 3 | 4 | 6 | 6 | 7 | 8 | 9 | dix | 11 | 12 | 13 | 14 | 15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VAR- Cette ligne est une variable.- Nom de variable.
- Signe égal.
- Crochet ouvert - (début des paramètres de formatage variables).
- Étiquette de variable - c'est-à-dire étiquette remplacée par la valeur de la variable.
- Barre verticale - Séparateur de paramètres.
A= Toujours afficher la valeur,C= Afficher uniquement la valeur lorsqu'elle change- Barre verticale - Séparateur de paramètres.
- Chaîne de caractères à imprimer avant la valeur de la variable.
- Barre verticale - Séparateur de paramètres.
- Indicateurs de format facultatifs - pour plus de détails, voir ci-dessous.
- Format de valeur - unités et nombre de décimales à afficher.
- Barre verticale - Séparateur de paramètres.
- Multiplicateur de sortie - pour plus de détails, voir ci-dessous.
- Fermer le crochet - Fin des paramètres de formatage.
Formatage de la valeur de sortie
La chaîne de format des valeurs doit être formatée comme suit :
FORMAT_FLAGS FIELD_WIDTH DECIMAL_SEPARATOR DECIMAL_PLACES
Les indicateurs de format sont facultatifs et ne sont nécessaires qu'à un petit nombre de contrôleurs ; ils seront décrits sous peu.
Largeur de champ La largeur de champ représente le nombre minimum de caractères qui sont émis. La largeur de champ est généralement fixée à "1" ; une valeur supérieure à 1 n'est généralement requise que si le contrôleur s'attend à voir un nombre fixe de caractères pour la valeur. Dans ce cas, un nombre supérieur à 1 peut être saisi. Le nombre saisi garantira la sortie de ce nombre de caractères. Le nombre qui représente la largeur du champ comprend le nombre complet à virgule flottante de la valeur de sortie (y compris le caractère séparateur décimal).
Séparateur décimal Le caractère du séparateur décimal est presque toujours un simple point, mais certains contrôleurs s'attendent à voir un caractère de virgule. (Pour un exemple de post processeur qui n'utilise pas le caractère point, voir le fichier : Heidenhain_inch.pp)
Décimales Le nombre de décimales sorties après le séparateur décimal. Les valeurs sont souvent fixées à 3 pour les contrôleurs fonctionnant en système métrique, ou à 4 pour les contrôleurs fonctionnant en pouces.
Indicateurs de format facultatifs
Les valeurs de sortie peuvent être modifiées davantage en utilisant les indicateurs de format facultatifs :
Drapeau | Fonction | Par défaut (sans indicateur) |
| Gauche Justifier la sortie | Les valeurs sont justifiées à juste titre |
| Préfixez la valeur avec '+' ou '-' | Seules les valeurs négatives sont préfixées |
| Si la valeur contient moins de caractères que le minimum défini, la valeur est préfixée par des zéros. | Les valeurs sont préfixées par des espaces vides |
| Values is always output with a separator character ( in practive this would only change the output value if the value is set to output integer values only) | Lorsque la sortie est définie sur un entier uniquement, le caractère séparateur n’est pas ajouté à la valeur. |
Formatage par défaut des variables
La plupart des variables ont un format par défaut ; (illustré ci-dessous) pour définir un format différent pour une variable, entrez la ligne ci-dessous dans votre post-processeur et modifiez les paramètres en fonction de votre contrôleur.
Défaut | Exemple |
|
Le numéro de ligne sera toujours affiché. Un caractère 'N' sera inséré avant le numéro de ligne. Il sera affiché sous forme de nombre entier |
|
La vitesse de broche sera toujours . Un caractère « S » sera inséré avant la valeur et il sera affiché sous forme de nombre entier. |
|
La vitesse d'avance sera affichée avec un caractère F avant la valeur et ne sera affichée que lorsqu'elle change. La valeur sera affichée à 1 décimale Note Dans cette chaîne de format, il existe un paramètre supplémentaire d'option. C'est le multiplicateur de valeur. |
VAR PLUNGE_RATE = [FP|A||1.0] |
Le taux de plongée sera affiché avec un caractère F avant la valeur et ne sera affiché que lorsqu'il change. La valeur sera affichée avec 1 décimale. Note Dans cette chaîne de format, il existe un paramètre supplémentaire d'option. C'est le multiplicateur de valeur. |
|
Le taux de réduction sera affiché avec un caractère F avant la valeur et ne sera affiché que lorsqu'il change. La valeur sera affichée avec 1 décimale. Note Dans cette chaîne de format, il existe un paramètre supplémentaire d'option. C'est le multiplicateur de valeur. |
|
La valeur de position sera affichée avec un caractère « X » avant la valeur, la position sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
|
|
La valeur de la position d'origine sera affichée avec un caractère « X » avant la valeur, la position sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
|
|
La valeur sera affichée avec un caractère « X » avant la valeur, la position sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
Note Dans cette chaîne de format, il existe un paramètre supplémentaire d'option. C'est le multiplicateur de valeur. |
|
La valeur sera affichée avec un caractère « Y » avant la valeur, la valeur sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
|
|
La valeur sera affichée avec un caractère « J » avant la valeur, la valeur sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
|
|
La valeur sera affichée avec un caractère « J » avant la valeur, la valeur sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
Note Dans cette chaîne de format, il existe un paramètre supplémentaire d'option. C'est le multiplicateur de valeur. |
|
La valeur sera affichée avec un caractère « X » avant la valeur, la valeur sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
|
|
La valeur sera affichée avec un caractère « X » avant la valeur, la valeur sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
|
|
La valeur sera affichée avec un caractère « R » avant la valeur, la valeur sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
|
|
La valeur sera affichée avec un caractère « A » avant la valeur, la valeur sera toujours affichée et sera affichée avec 3 décimales, ce qui conviendra généralement à un contrôle nécessitant une sortie métrique. Si vous souhaitez afficher les valeurs à 4 décimales, comme cela serait plus typique pour un contrôleur fonctionnant en pouces. Vous formateriez la ligne comme suit.
|
|
La valeur sera affichée avec un caractère « X » avant la valeur, la valeur sera toujours affichée et sera affichée à 3 décimales. |
Valeur du multiplicateur
La valeur du multiplicateur est utilisée pour multiplier la valeur afin d'obtenir une valeur différente. Les raisons courantes pour lesquelles vous souhaitez le faire sont :
Pour convertir la sortie par défaut d'un post-processeur en pouces, de pouces par minute en pouces par seconde (multiplier par 0,01666).
Pour convertir la sortie par défaut d'un post-processeur métrique, de mm par minute en mm par seconde (multiplier par 0,0166).
Pour rendre négatives les valeurs positives (et vice versa), (Multiplier par -1).
Pour convertir la sortie d'un angle d'arc de radians en degrés (multiplier par 57,2957795).
Pour multiplier ou diviser par un facteur fixe (IE produit un modèle à l'échelle 1:4, multiplier par 0,25)
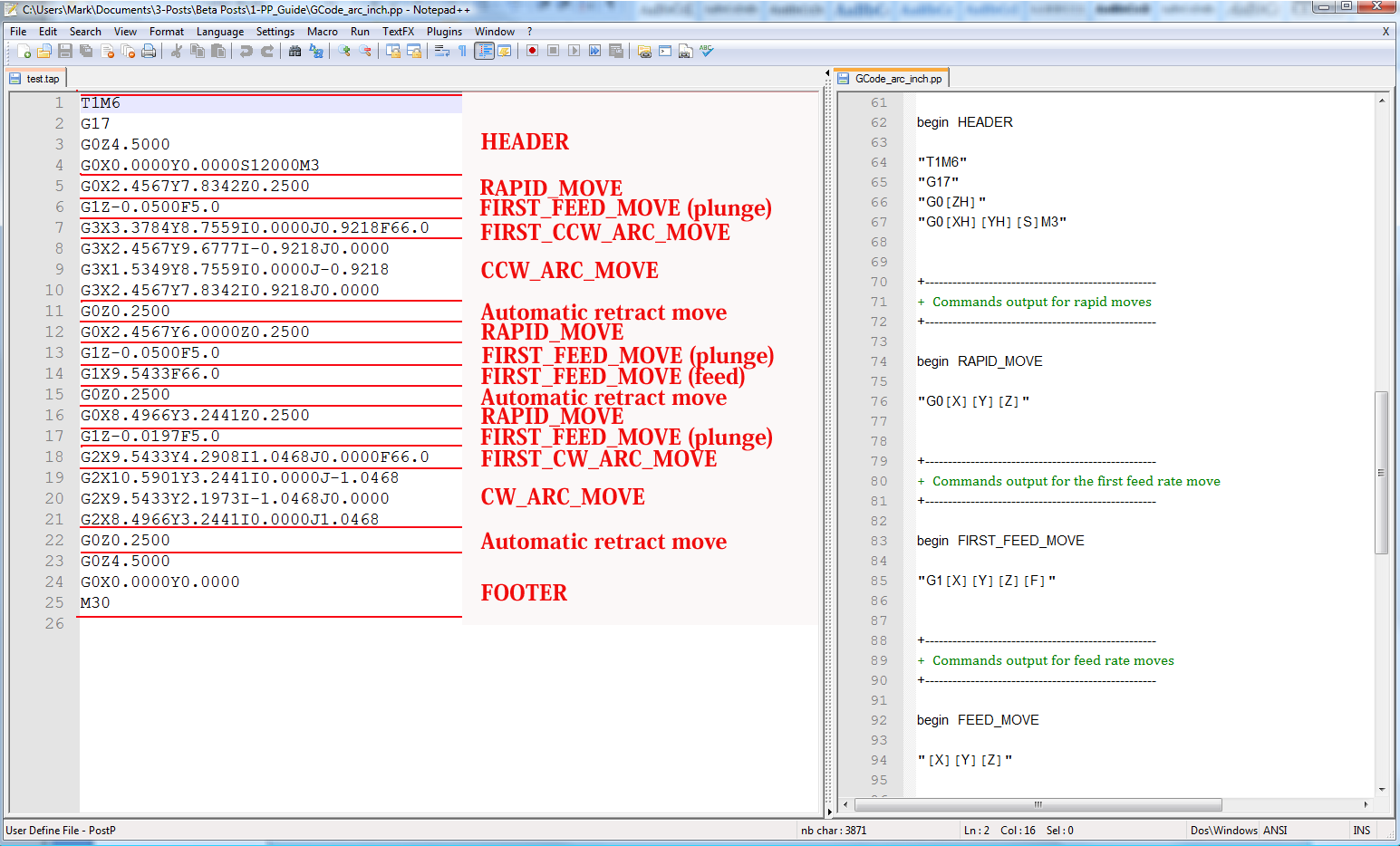
Blocs de post-processeur
ENTÊTE
+---------------------------------------------------
+ Commands output at the start of the file
+---------------------------------------------------
begin HEADER
"Commands"
L'en-tête est l'emplacement des instructions qui sont sorties une fois, au début du fichier, celles-ci configurent généralement les commandes modales pour le contrôleur.
Par exemple, l'en-tête peut contenir une commande pour afficher le nom du fichier sur le contrôleur et une série de « codes G » pour configurer la machine, par exemple G20 pour indiquer au contrôleur que les mouvements sont en pouces, ou G21 pour indiquer le contrôler que les mouvements sont en millimètres.
Les variables que vous souhaiteriez peut-être inclure dans la section d'en-tête peuvent inclure :
Informations sur le bloc de matériel
- Étendue minimale en X = [XMIN]
- Étendue minimale en Y = [YMIN]
- Étendue minimale en Z = [ZMIN]
- Étendue maximale en X = [XMAX]
- Étendue maximale en Y = [YMAX]
- Étendue maximale en Z = [ZMAX]
- Longueur du matériau en X = [XLENGTH]"
- Longueur du matériau en Y = [YLENGTH]"
- Profondeur de matière en Z = [ZLENGTH]"
Informations sur la position d'origine
- Accueil X = [XH]
- Accueil Y = [YH]
- Accueil Z = [ZH]
- Jeu de dégagement rapide ou Safe Z = [SAFEZ]
Détails du premier outil à utiliser.
- Numéro d'outil = [T]
- Nom de l'outil = [NOM DE L'OUTIL]
Vitesses de coupe initiales
- Avance utilisée pour couper et plonger dans la matière = [F]
- Avance pendant que l'outil coupe le matériau = [FC]
- Avance pendant que l'outil plonge dans le matériau = [FP]
Les valeurs réelles dépendent du réglage UNITS (voir Paramètres globaux du fichier). Les valeurs par défaut sont MM/Minute ou Inches/Minute, mais la sortie peut être modifiée en conséquence en définissant le formatage « VAR FEED_RATE » approprié.
Vitesse de la broche
- Vitesse de broche = [S] tr/min
SPINDLE_ON
+---------------------------------------------------
+ Commands output at when the Spindle first turns on.
+---------------------------------------------------
begin SPINDLE_ON
"Commands"
La section Broche activée a été ajoutée pour permettre les opérations de broche et de laser dans le même post-processeur au lieu d'avoir la broche en commande dans le cadre de l'en-tête.
Généralement, cela aura simplement la commande Broche activée (M03 par exemple) mais peut également inclure une commande de vitesse de broche [S]
CHANGEMENT D'OUTIL
+---------------------------------------------------
+ Commands output at toolchange
+---------------------------------------------------
begin TOOLCHANGE
"Commands"
Commandes émises lorsqu'un changement d'outil est requis. Les variables et commandes pouvant être utilisées incluent :
- Numéro d'outil précédent = [TP]
- Numéro d'outil = [T]
- Nom de l'outil = [NOM DE L'OUTIL]
- Nom du parcours d'outil = [TOOLPATH_NAME]
- Nom du chemin d'outil = [NOM DU CHEMIN]
- Nom du fichier de parcours d'outil = [TP_FILENAME]
- Répertoire de fichiers de parcours d'outil = [TP_DIR]
- Extension du parcours d'outil = [TP_EXT]
- Vitesse de broche = [S] tr/min
- Code M3 M souvent utilisé pour allumer la broche (rotation dans le sens des aiguilles d'une montre).
- M5 M Code souvent utilisé pour éteindre la broche.
NOUVEAU_SEGMENT
+---------------------------------------------------
+ Commands output for a new segment ( new toolpath with current toolnumber)
+---------------------------------------------------
begin NEW_SEGMENT
"Commands"
Pour un exemple de section NEW_SEGMENT, voir le fichier : Mach2_3_ATC_Arcs_inch.pp
Commandes qui sont émises lorsqu'un nouveau parcours d'outil utilise l'outil actuellement sélectionné, mais qu'une vitesse de broche différente est peut-être requise ou que la machine nécessite des instructions supplémentaires.
Toutes les commandes utilisées dans la section NEW_SEGMENT ne doivent pas avoir besoin d'être incluses dans la section TOOLCHANGE car un changement d'outil appellera également automatiquement les instructions de la section NEW_SEGMENT.
Les variables couramment utilisées sont les suivantes.
- Vitesse de broche = [S] tr/min
- Code M3 M souvent utilisé pour allumer la broche (rotation dans le sens des aiguilles d'une montre).
- M5 M Code souvent utilisé pour éteindre la broche.
INITIAL_RAPID_MOVE
+---------------------------------------------------
+ Commands output for Initial rapid move
+---------------------------------------------------
begin INITIAL_RAPID_MOVE
"Commands"
Pour un exemple de section INITIAL_RAPID_MOVE, voir le fichier : Saom_OSAI_Arc_inch.pp
Commandes qui sont émises lorsque le tout premier mouvement rapide est effectué après l'en-tête ou un changement d'outil. Une section qui n'est pas utilisée pour la plupart des postes, mais qui est utile si le tout premier déplacement rapide, doit sortir des informations différentes des déplacements rapides suivants. Cette section est parfois nécessaire pour les variantes de HPGL.
RAPID_MOVE
+---------------------------------------------------
+ Commands output for rapid moves.
+---------------------------------------------------
begin RAPID_MOVE
"Commands"
Commandes qui sont émises lorsque des mouvements rapides sont nécessaires.
FIRST_FEED_MOVE
+---------------------------------------------------
+ Commands output for first feed rate move in a series of feed moves.
+---------------------------------------------------
begin FIRST_FEED_MOVE
"Commands"
Cette section est couramment utilisée lorsque les contrôleurs exigent que la vitesse d'avance soit réglée lors du premier mouvement d'alimentation, cette vitesse serait ensuite utilisée pour les mouvements de coupe ultérieurs.
Pour un exemple de section FIRST_FEED_MOVE, voir le fichier : Axyz_Arcs_ATC_inch.pp
FEED_MOVE
+---------------------------------------------------
+ Commands output for feed rate moves
+---------------------------------------------------
begin FEED_MOVE
"Commands"
Utilisé pour afficher les informations requises à chaque mouvement, ou à tous les mouvements d'alimentation, à l'exception du premier mouvement d'alimentation, si une section FIRST_FEED_MOVE est présente dans le post-processeur.
FIRST_CW_ARC_MOVE
+---------------------------------------------------
+ Commands output for the first clockwise arc move in a series of cw arc moves
+---------------------------------------------------
begin FIRST_CW_ARC_MOVE
"Commands"
Similaire à la section FIRST_FEED_MOVE, mais pour les segments d'arc dans le sens des aiguilles d'une montre. Cette section est généralement utilisée lorsque les contrôleurs exigent que la vitesse d'avance soit définie pour le premier segment d'arc, cette vitesse étant ensuite utilisée pour les mouvements d'arc suivants dans la même direction.
Pour un exemple de section FIRST_CW_ARC_MOVE, voir le fichier : Centroid_Arcs_inch.pp
FIRST_CW_HELICAL_ARC_PLUNGE_MOVE
+---------------------------------------------------
+ Commands output for clockwise helical arc plunge move in a series of moves.
+---------------------------------------------------
begin FIRST_CW _HELICAL_ARC_MOVE
"Commands"
Similaire à la section FIRST_CW_ARC_MOVE, mais pour les mouvements qui se déplacent également en Z. Les vitesses d'avance sont issues de la vitesse de plongée définie pour l'outil.
Pour un exemple de section CW_HELICAL_ARC_PLUNGE_MOVE, voir le fichier : Mach2_3_ATC_Arcs_inch.pp
FIRST_CW_HELICAL_ARC_MOVE
+---------------------------------------------------
+ Commands output for clockwise helical arc move in a series of moves.
+---------------------------------------------------
begin FIRST_CW_HELICAL_ARC_MOVE
"Commands"
Similaire à la section FIRST_CW_ARC_MOVE, mais pour les mouvements qui se déplacent également en Z.
Pour un exemple de section CW_HELICAL_ARC_MOVE, voir le fichier : Mach2_3_ATC_Arcs_inch.pp
CW_ARC_MOVE
+---------------------------------------------------
+ Commands output for clockwise arc moves.
+---------------------------------------------------
begin CW_ARC_MOVE
"Commands"
Semblable à la section FEED_MOVE, mais pour les segments d'arc dans le sens des aiguilles d'une montre.
Pour un exemple de section CW_ARC_MOVE, voir le fichier : Centroid_Arcs_inch.pp
CW_HELICAL_ARC_MOVE
+---------------------------------------------------
+ Commands output for clockwise helical arc moves
+---------------------------------------------------
begin CW_HELICAL_ARC_MOVE
"Commands"
Similaire à la section CW_ARC_MOVE, mais pour les mouvements qui se déplacent également en Z.
Pour un exemple de section CW_HELICAL_ARC_MOVE, voir le fichier : Mach2_3_ATC_Arcs_inch.pp
FIRST_CCW_ARC_MOVE
+---------------------------------------------------
+ Commands output for the first counter-clockwise arc move in a series of ccw arc moves.
+---------------------------------------------------
begin FIRST_CCW_ARC_MOVE
"Commands"
Similaire à la section FIRST_FEED_MOVE, mais pour les segments d'arc dans le sens inverse des aiguilles d'une montre. Cette section est couramment utilisée lorsque les contrôleurs exigent que la vitesse d'avance soit définie pour le premier segment d'arc, cette vitesse serait ensuite utilisée pour les mouvements d'arc ultérieurs dans la même direction.
Pour un exemple de section FIRST_CCW_ARC_MOVE, voir le fichier : Centroid_Arcs_inch.pp
FIRST_CCW_HELICAL_ARC_PLUNGE_MOVE
+---------------------------------------------------
+ Commands output for counter- clockwise helical arc plunge move in a series of moves.
+---------------------------------------------------
begin FIRST_CCW_HELICAL_ARC_MOVE
"Commands"
Semblable à la section FIRST_CCW_ARC_MOVE, mais pour les mouvements qui se déplacent également en Z. Les vitesses d'avance produites proviennent de la vitesse de plongée définie pour l'outil.
Pour un exemple de section CCW_HELICAL_ARC_PLUNGE_MOVE, voir le fichier : Mach2_3_ATC_Arcs_inch.pp
FIRST_CCW_HELICAL_ARC_MOVE
+---------------------------------------------------
+ Commands output for first counter-clockwise helical arc move in a series of moves.
+---------------------------------------------------
begin FIRST_CCW_HELICAL_ARC_MOVE
"Commands"
Similaire à la section FIRST_CCW_ARC_MOVE, mais pour les mouvements qui se déplacent également en Z.
Pour un exemple de section CCW_HELICAL_ARC_MOVE, voir le fichier : Mach2_3_ATC_Arcs_inch
CCW_ARC_MOVE
+---------------------------------------------------
+ Commands output for counter-clockwise arc moves.
+---------------------------------------------------
begin CCW_ARC_MOVE
"Commands"
Similaire à la section FEED_MOVE, mais pour les segments d'arc dans le sens inverse des aiguilles d'une montre.
Pour un exemple de section CCW_ARC_MOVE, voir le fichier : Centroid_Arcs_inch.pp
CCW_HELICAL_ARC_MOVE
+---------------------------------------------------
+ Commands output for counter-clockwise helical arc moves
+---------------------------------------------------
begin CCW_HELICAL_ARC_MOVE
"Commands"
Similaire à la section CCW_ARC_MOVE, mais pour les mouvements qui se déplacent également en Z.
Pour un exemple de section CCW_HELICAL_ARC_MOVE, voir le fichier : Mach2_3_ATC_Arcs_inch.pp
BAS DE PAGE
Le pied de page est la section du post-processeur destinée aux instructions qui sont envoyées au contrôleur à la fin d'un fichier. Il peut s'agir d'instructions visant à ramener l'outil en position de départ, à arrêter la broche ou à couper l'alimentation des entraînements.
+---------------------------------------------------
+ Commands output at the end of the file
+---------------------------------------------------
begin FOOTER
"Commands"
Les variables couramment utilisées sont les suivantes.
- G00 [XH] [YH] [ZH] Rapide à la position de base X, Y, Z.
- M05 M Code souvent utilisé pour arrêter la broche.
- M30 M Code souvent utilisé pour signifier la fin du fichier.
SPINDLE_ON
La section Broche activée est utilisée après l'en-tête et permet d'utiliser les commandes Broche activée dans une combinaison Fraisage/Post-processeur laser.
Si les commandes Spindle on sont utilisées dans l’en-tête, ce bloc ne doit pas être inclus.
+---------------------------------------------------
+ Commands output at the end of the file
+---------------------------------------------------
begin SPINDLE_ON
"Commands"
Les variables couramment utilisées sont les suivantes.
- M3 pour broche allumée
- [S] Pour la vitesse de broche
Sections de support des jets
Ces sections sont destinées à soutenir les outils de découpe par jet tels que les lasers, les plasmas et les hydrojets.
JET_TOOL_POWER
+---------------------------------------------------
+ Commands output when the cutter's power is set
+---------------------------------------------------
begin JET_TOOL_POWER
"Commands"
Pour un exemple de section JET_TOOL_POWER, voir le fichier : Grbl.pp
Commandes émises lorsque le paramètre de puissance associé à un "outil" laser est émis.
JET_TOOL_ON
+---------------------------------------------------
+ Commands output when the cutter's power is turned ON
+---------------------------------------------------
begin JET_TOOL_ON
"Commands"
Pour un exemple de section JET_TOOL_ON, voir le fichier : Grbl.pp
Commandes qui sont émises lorsque l'outil de jet est mis sous tension. Cette commande est globalement équivalente à SPINDLE_ON, mais elle est généralement émise à la fin d'un mouvement de plongée lorsque l'outil de coupe à jet est déjà à la hauteur de coupe prévue, au lieu d'être émise avant le mouvement de plongée comme l'exige un outil de coupe à broche.
JET_TOOL_OFF
+---------------------------------------------------
+ Commands output when the cutter's power is turned OFF
+---------------------------------------------------
begin JET_TOOL_OFF
"Commands"
Pour un exemple de section JET_TOOL_OFF, voir le fichier : Grbl.pp
Commandes émises lorsque l'outil à jet est mis hors tension.
Autres sections moins fréquemment utilisées
FEED_RATE_CHANGE
+---------------------------------------------------
+ Commands output when feed rate changes
+---------------------------------------------------
begin FEED_RATE_CHANGE
"Commands"
Pour un exemple de section FEED_RATE_CHANGE, voir le fichier : Gravograph_IS200.pp
Commandes qui sont émises lorsque la vitesse d'avance est modifiée. Cette section n'est pas souvent utilisée car de nombreux contrôleurs acceptent les changements de vitesse d'avance joints à d'autres instructions, mais elle est parfois utilisée avec les variantes HPGL.
FIRST_PLUNGE_MOVE
+---------------------------------------------------
+ Commands output for the First Plunge Move, in a series of plunge moves.
+---------------------------------------------------
begin FIRST_PLUNGE_MOVE
"Commands"
Pour un exemple de section FIRST_PLUNGE_MOVE, voir le fichier : Holz-Her_7123_ATC_Arcs_mm.pp
Cette section est souvent utilisée sur des machines qui ne supportent pas complètement le mouvement 3D simultané, par exemple l'axe Z ne peut pas se déplacer aussi rapidement que les axes X et Y. Une autre utilisation de cette section pourrait être d'inclure des commandes que vous souhaitez émettre à chaque fois que le premier mouvement de plongée se produit. Par exemple, des commandes pour allumer une torche à plasma. Cette commande est donc utile pour les commandes qui accélèrent automatiquement entre les coupes et pour lesquelles des instructions telles que les vitesses révisées et l'avance doivent être spécifiées lors du premier mouvement de plongée et ces instructions ne sont pas nécessaires pour les mouvements de plongée suivants dans l'opération de rampe.
PLUNGE_MOVE
+---------------------------------------------------
+ Commands output for Plunge Moves
+---------------------------------------------------
begin PLUNGE_MOVE
"Commands"
Pour un exemple de section PLUNGE_MOVE, voir le fichier : Burny_arc_inch.pp
Cette section est souvent utilisée sur des machines qui ne supportent pas complètement le mouvement 3D simultané, par exemple l'axe Z ne peut pas se déplacer aussi rapidement que les axes X et Y. Une autre utilisation de cette section pourrait être d'inclure les commandes que vous souhaitez émettre à chaque fois qu'un mouvement de plongée se produit. Par exemple, des commandes pour allumer une torche à plasma.
RETRACT_MOVE
+---------------------------------------------------
+ Commands output for Retract Moves
+---------------------------------------------------
begin RETRACT_MOVE
"Commands"
Pour un exemple de section RETRACT _MOVE, voir le fichier : Burny_arc_inch.pp
Une utilisation de cette section pourrait être d'inclure des commandes pour éteindre une torche à plasma.
DWELL_MOVE
+---------------------------------------------------
+ Commands output for Dwell Commands
+---------------------------------------------------
begin DWELL_MOVE
"Commands"
Pour un exemple de section DWELL_MOVE, voir le fichier : Mach2_3_Arcs_inch.pp
Cette commande a été introduite pour VCarve Pro 7.5 et Aspire 4.5 et plus. Elle est utilisée avec un parcours de perçage, lorsqu'un temps de séjour a été spécifié dans le programme. Si cette section n'est pas définie, toutes les commandes de temporisation sont ignorées, mais le reste du parcours de perçage sera produit normalement. La variable DWELL est documentée dans la section Variables.
Caractères spéciaux
La plupart des caractères peuvent être édités dans les limites des instructions de sortie du post-processeur. Cependant, certains caractères ont une signification particulière dans les fichiers de configuration du post-processeur et ne peuvent pas être édités directement.
Il s'agit des crochets [ ], et du caractère guillemet double " Il se peut que vous ayez besoin de sortir un de ces caractères dans votre fichier de sortie.
Si vous souhaitez éditer l'un de ces caractères, vous pouvez le faire en plaçant entre crochets l'équivalent décimal de la valeur ASCII du caractère spécial que vous souhaitez éditer, comme indiqué ci-dessous. Cette méthode peut également être utilisée pour insérer n'importe quelle valeur ASCII, même des caractères non imprimables.
- [91] Affiche un crochet à gauche.
- [93] Produit un crochet droit.
- [34] Émet un caractère de guillemet double.
- [13] Émet un retour chariot.
- [10] Émet un saut de ligne.
Pour un exemple de fichier utilisant des caractères spéciaux, veuillez consulter : Biesse_Rover_Arcs_mm.pp
Exemple : Ajout de commandes de changement d'outil
Dans la majorité des cas, le moyen le plus rapide et le plus simple de produire un post-processeur personnalisé adapté à votre contrôleur consistera à modifier un post-processeur existant. Pour ce faire, créez d'abord un fichier de test simple que vous pouvez utiliser pour tester la sortie de votre post-processeur. Un fichier simple peut être constitué d'une ligne et de deux cercles. Produire des parcours d'outils de profil de coupe peu profond pour chacune des formes, en usinant « sur » la ligne, « à l'intérieur » d'un des cercles et « à l'extérieur » de l'autre cercle.
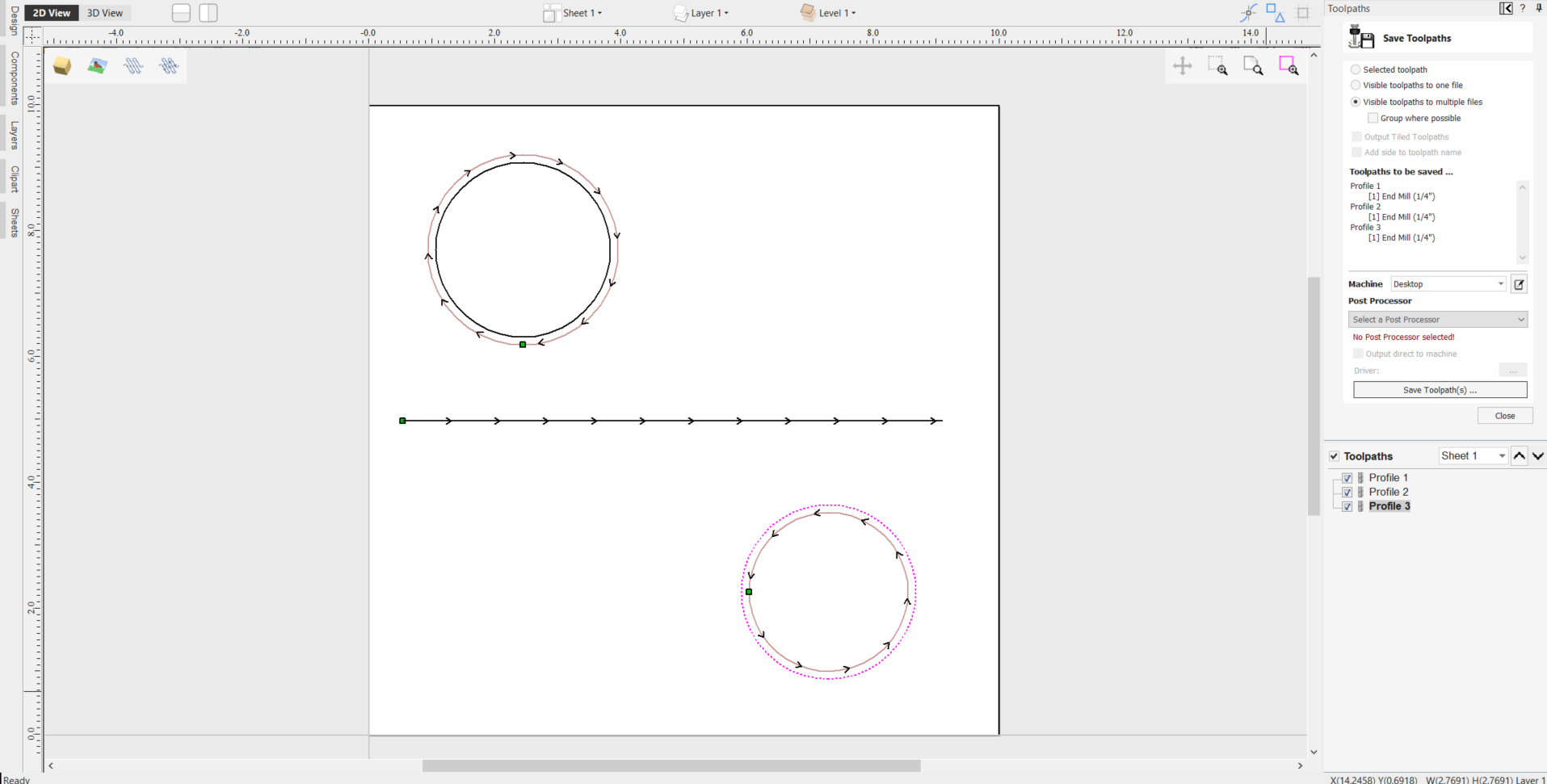
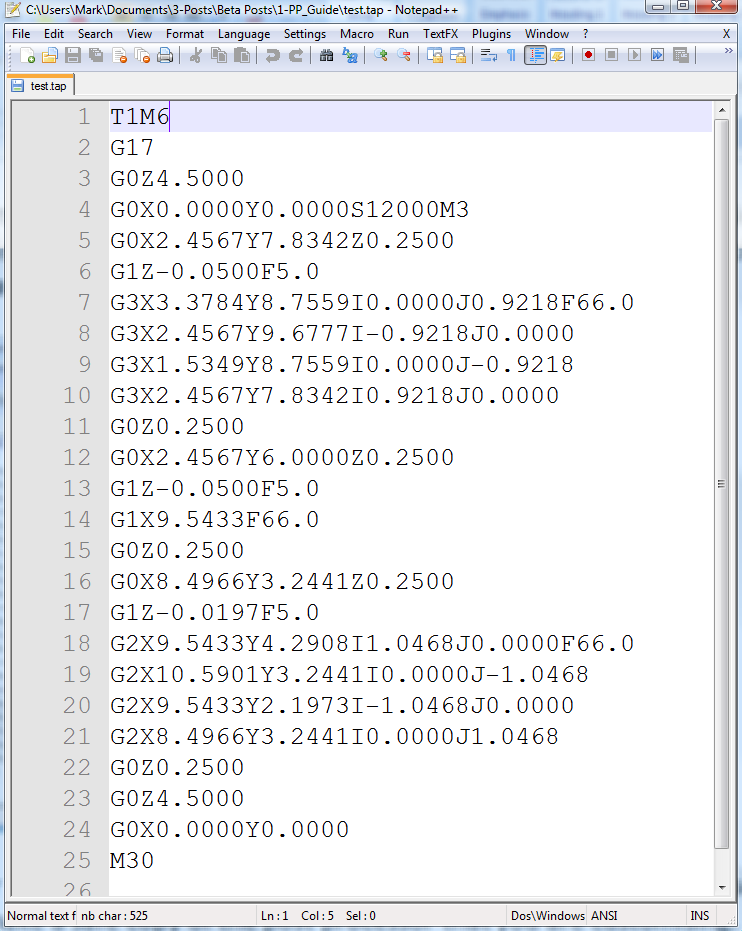
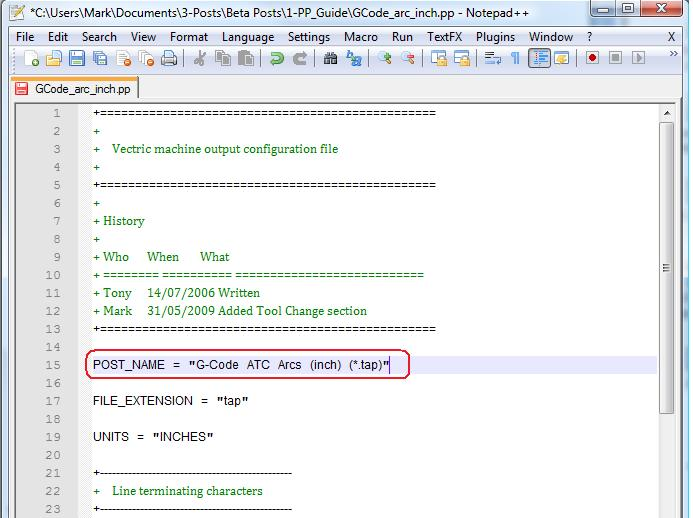
Enregistrez un parcours d'outil à l'aide de votre post-processeur de base et examinez-le à l'aide de votre éditeur de texte préféré. Vous trouverez ci-dessous un exemple du fichier de test publié à l'aide du post-processeur "G-Code Arcs (inch) (*.tap)". L'exemple ci-dessous est affiché à l'aide de l'éditeur populaire Notepad ++.
Pour notre exemple, nous ajouterons une section de changement d'outil à ce post-processeur. Accédez à l’option Configuration de la machine sous le menu de la machine.
Dans la section Post-processeur associé, cliquez sur l'icône (+) et faites défiler la liste pour localiser votre post-processeur dans la liste.
Faites un clic droit dessus et sélectionnez Personnaliser
Une nouvelle copie du post-processeur apparaîtra en haut de la liste avec une icône de stylo à côté.
Faites un clic droit sur cette copie et sélectionnez Lieu de fichier ouvert
Cela ouvrira le dossier Windows avec le fichier .pp Post Processor lui-même que vous pourrez ensuite modifier directement si vous devez ajuster les commandes pour les adapter. la configuration particulière de votre machine. Ces fichiers de post-processeur .pp peuvent être modifiés dans n'importe quel logiciel d'édition de texte standard.
Pour ajouter une section de changement d'outil au post-processeur, vous devrez consulter la documentation de contrôle de la machine-outil (ou du logiciel de contrôle). Pour cet exemple, nous supposerons que les instructions que vous devez ajouter pour effectuer un changement d'outil pour votre machine-outil particulière sont les suivantes :
- M05 Instruction d'éteindre la broche avant le changement d'outil.
- M0 Instruction pour remettre l'outil existant sur le porte-outil.
- M06TTool_Number n Instruction pour sélectionner un nouvel outil Tool_Number n
- G43HTool_Number n Instruction pour que le contrôle utilise le décalage de longueur d'outil pour l'outil n
- Sxxx M03 Régler la vitesse de broche sur xxx ; Allumez la broche (rotation dans le sens des aiguilles d’une montre).
Modifiez le post-processeur à l'aide de votre éditeur de texte préféré.
Si le système d'exploitation de votre ordinateur est Microsoft Vista et que le contrôle d'accès des utilisateurs est activé, copiez ou déplacez le post-processeur que vous modifiez du dossier PostP vers un dossier situé sous votre zone utilisateur.
La première chose que vous devez modifier dans le fichier est la section Commentaire de l'historique, afin d'avoir une trace des modifications.
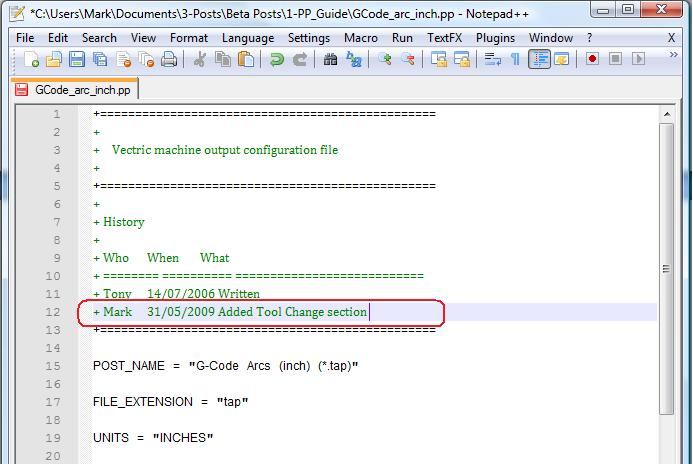
Modifiez ensuite le POST_NAME pour indiquer que ce post processeur produit des commandes de changement d'outil automatique (ATC), le nouveau post sera affiché comme "G-Code ATC Arcs (inch)(*.tap)" dans la liste des post processeurs.
Ajoutez ensuite une section de changement d'outil qui comprendra les instructions. L'emplacement de la nouvelle section dans le fichier n'est pas important, mais un bon endroit pour l'insérer est entre les sections En-tête et Déplacement rapide.
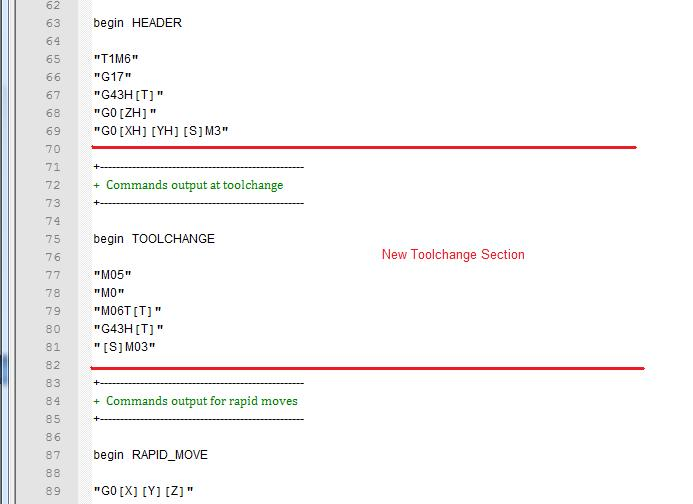
Ajoutez quelques lignes de commentaires en haut de la nouvelle section (commençant par le caractère +) pour décrire la section et rendre le fichier dans son ensemble plus facile à lire. Saisissez ensuite la ligne "begin TOOLCHANGE" pour indiquer au post-processeur que les instructions suivantes doivent être émises pour chaque changement d'outil (à l'exception de la sélection initiale de l'outil, dont les commandes sont contenues dans la section En-tête).
L'étape suivante consiste à entrer les instructions dont vous avez besoin, entre guillemets. Les "[T]" des troisième et quatrième lignes d'instructions de notre exemple seront remplacés par le numéro de l'outil lors du post-traitement du fichier ; les "[S]" de la cinquième ligne seront remplacés par la vitesse de rotation de l'outil.
Enfin, vous devrez enregistrer les modifications apportées au fichier, puisque vous avez changé le POST_NAME, enregistrez le fichier en utilisant un nouveau nom, par exemple “GCODE_ATC_Arcs_inch.pp”
Si le système d'exploitation de votre ordinateur est Microsoft Windows 7 ou Microsoft Vista et que le contrôle d'accès des utilisateurs est activé, copiez le fichier que vous avez modifié dans le dossier "PostP".
Pour tester le nouveau post-processeur, Si le logiciel est en cours d'exécution, redémarrez-le.
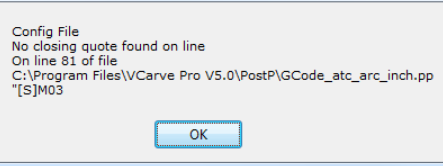
Si votre post-processeur présente des erreurs de syntaxe, une erreur similaire à l'image ci-dessous s'affichera au démarrage du logiciel, le post-processeur que vous avez modifié n'apparaîtra pas dans la liste déroulante des fichiers de configuration du post-processeur. Vous devrez rectifier les erreurs et redémarrer le logiciel.
Si aucune erreur ne s'affiche au démarrage du logiciel, ouvrez votre fichier de test et enregistrez un ou plusieurs de vos parcours de test.
Sélectionnez le post-processeur dans la liste déroulante de configuration du post-processeur et appuyez sur le bouton "Save Toolpath(s)".
Examinez le fichier que vous venez d'enregistrer dans un éditeur de texte.
Si le contenu du fichier semble bon, essayez le fichier sur votre machine.
Veuillez prendre toutes les précautions nécessaires lorsque vous exécutez la sortie d'un post-processeur modifié pour la première fois.
Exemple : Changement de l'extension de fichier
L'extension du fichier automatiquement produite par le post-processeur peut être modifiée dans la boîte de dialogue « Enregistrer sous », lorsque vous cliquez sur le bouton « Enregistrer le(s) parcours d'outil ».
Cependant, plutôt que de changer l'extension du fichier à chaque fois. Il est plus pratique de modifier définitivement l'extension du fichier produite par le post-processeur.
Pour faire ça:
Pour notre exemple, nous ajouterons une section de changement d'outil à ce post-processeur. Accédez à l’option Configuration de la machine sous le menu de la machine.
Dans la section Post-processeur associé, cliquez sur l'icône (+) et faites défiler la liste pour localiser votre post-processeur dans la liste.
Faites un clic droit dessus et sélectionnez Personnaliser
Une nouvelle copie du post-processeur apparaîtra en haut de la liste avec une icône de stylo à côté.
Faites un clic droit sur cette copie et sélectionnez Lieu de fichier ouvert
Cela ouvrira le dossier Windows avec le fichier .pp Post Processor lui-même que vous pourrez ensuite modifier directement si vous devez ajuster les commandes pour les adapter. la configuration particulière de votre machine. Ces fichiers de post-processeur .pp peuvent être modifiés dans n'importe quel logiciel d'édition de texte standard.
Modifiez le post-processeur à l'aide de votre éditeur de texte préféré.
Si le système d'exploitation de votre ordinateur est Microsoft Windows 7 ou Microsoft Vista et que le contrôle d'accès utilisateur est activé, copiez ou déplacez le post-processeur que vous modifiez du dossier PostP vers un dossier situé sous votre zone utilisateur.
Recherchez les deux lignes suivantes dans le fichier de configuration du post-processeur qui commencent par :
POST_NAME =
FILE_EXTENSION =
et modifiez-les en conséquence.
Par exemple, si vous souhaitez modifier l'extension de fichier produite par le post-processeur « G Code ATC (inch)(*.tap) » de « .tap » à « .nc ». Modifiez ensuite les lignes :
POST_NAME = "G Code ATC (inch) (*.tap)"
FILE_EXTENSION = "tap"
pour leur faire lire :
POST_NAME = "G Code ATC (inch) (*.nc)"
FILE_EXTENSION = "nc"
Enregistrez les modifications dans votre fichier. Si le système d'exploitation de votre ordinateur est Microsoft Windows 7 ou Microsoft Vista et que le contrôle d'accès utilisateur est activé, copiez le fichier que vous avez modifié dans le dossier « PostP ».
Pour tester le nouveau post-processeur, si le logiciel est en cours d'exécution, redémarrez-le. S'il y a des erreurs de syntaxe avec votre post-processeur, une erreur similaire à l'image ci-dessous s'affichera au démarrage du logiciel, le post-processeur que vous avez modifié n'apparaîtra pas dans la liste déroulante des fichiers de configuration du post-processeur. Vous devrez rectifier les erreurs et redémarrer le logiciel.
Si aucune erreur ne s'affiche au démarrage du logiciel, ouvrez votre fichier de test et enregistrez un ou plusieurs de vos parcours de test.
Sélectionnez le post-processeur dans la liste déroulante de configuration du post-processeur et appuyez sur le bouton "Save Toolpath(s)".
Examinez le fichier que vous venez d'enregistrer dans un éditeur de texte.
Si le contenu du fichier semble bon, essayez le fichier sur votre machine.
Veuillez prendre toutes les précautions nécessaires lorsque vous exécutez la sortie d'un post-processeur modifié pour la première fois.
Trucs et astuces
Faites toujours une copie sûre du traitement de texte que vous modifiez, au cas où vous devriez recommencer à zéro.
Si vous utilisez un programme de traitement de texte, tel que Microsoft Word, pour modifier un post-processeur, assurez-vous que le fichier est enregistré en texte brut. Le fichier ne doit pas contenir d'informations de formatage.
Si vous modifiez des post-processeurs sur un ordinateur fonctionnant sous Microsoft Windows 7 ou Microsoft Vista, ne modifiez pas les fichiers directement dans le dossier "Program Files\Product folder\PostP". Modifiez toujours le fichier dans votre espace utilisateur et copiez le fichier modifié dans le dossier "Program Files\Product folder\PostP".
Utilisez des commentaires lorsque vous apportez des modifications. Un commentaire est un texte qui suit un caractère + ou |. Les commentaires ne sont pas pris en compte par le programme, mais ils peuvent vous aider à documenter les modifications que vous avez apportées et à les rendre compréhensibles à l'avenir.
Toutes les lignes d'instruction doivent être contenues entre guillemets.
Si possible, utilisez un éditeur de texte qui utilise les numéros de ligne ; cela facilitera le débogage du post-processeur en cas d'erreur dans le fichier. Le programme vérifie les post-processeurs dans le dossier PostP au démarrage du programme. Si des erreurs de syntaxe sont présentes dans le fichier, un message d'erreur sera affiché, indiquant le numéro de ligne de la première erreur rencontrée.
Une fois que vous avez modifié avec succès un post-processeur, faites-en une copie sûre. Si vous installez une version ultérieure du produit Vectric que vous utilisez, pensez à copier votre post processeur modifié dans le dossier PostP de la nouvelle version du logiciel. Et sélectionnez votre post processeur modifié, la première fois que vous enregistrez un parcours, (le logiciel se souviendra de votre sélection pour les actions suivantes).
Si vous installez une autre version du logiciel ou si vous mettez à jour la version du logiciel, n'oubliez pas de copier vos copies sécurisées de vos post-processeurs modifiés dans le dossier PostP de la nouvelle version. Assurez-vous de sélectionner le post-traitement correct la première fois que vous post-traitez un fichier à l'aide de la nouvelle version du logiciel.
Pour les versions ultérieures du logiciel, (V5.5 et plus). Les post-traitements sont accessibles à partir de l'application, en cliquant sur "Fichier > Ouvrir le dossier de données de l'application - Dossier Post-traitement".
Une liste personnalisée de post-processeurs peut être créée en copiant uniquement les post-processeurs requis dans le dossier "File > Open Application Data Folder\My_PostP". Si un fichier avec une extension .pp existe dans le dossier "My_PostP", seuls les post-processeurs qui existent dans le dossier My_PostP seront affichés dans la liste déroulante des post-processeurs.
Conventions de dénomination des post-processeurs
Dans les post-processeurs livrés avec les produits, vous verrez les termes ou abréviations suivants utilisés :
- Arc ou Arcs = Le post-processeur produit des arcs réels dans le dessin en tant que mouvements d'arc (G2, G3, rayon de l'arc, etc.).
- Inc = Les arcs sont affichés avec des coordonnées centrales incrémentales par rapport au dernier déplacement.
- Abs = Les arcs sont affichés avec des valeurs de coordonnées absolues.
- ATC = Le post-processeur émet des commandes de changement automatique d'outil (ATC).
- WY = Post-processeur de sortie enveloppé - valeurs Y enveloppées autour de l'axe X.
- WX = Post processeur de sortie enveloppé - valeurs X enveloppées autour de l'axe Y.
- TSnumber = Post processeur de division de bande.
- Un nombre optionnel est le nombre maximum de lignes qui seront produites dans un seul fichier. Les fichiers qui dépassent ce nombre de lignes seront divisés en plusieurs fichiers. (Voir Tape Splitting Support pour plus de détails).
- (mm) = Les unités du post-processeur sont métriques.
- (inch) = Les unités du post-processeur sont des pouces anglais (impériaux).
- (*.xyz) = L'extension de fichier avec laquelle le fichier de sortie sera créé.